介绍:本章节主要讲解如何在 STM32C8T6 上使用 PWM 驱动舵机。通过按键输入控制,输出以 PWM 信号调整舵机转动角度,从而实现对舵机的精准控制。
目录
一、接线图
二、相关参数的计算
三、相关代码的编写
四、程序现象
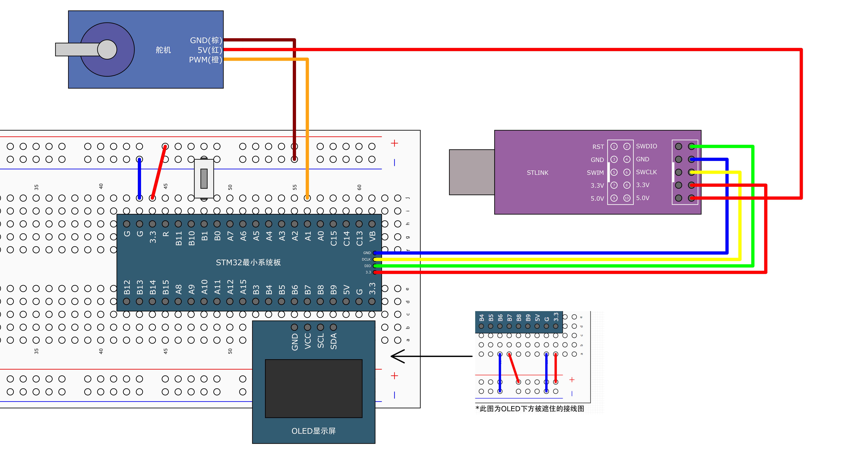
一、接线图
二、相关参数的计算
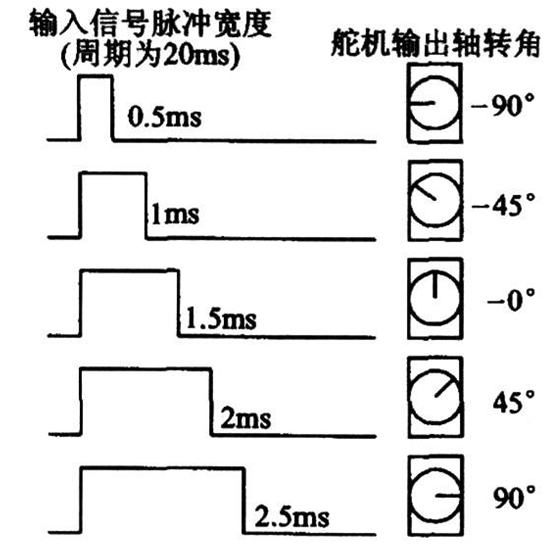
PWM频率:•Freq = CK_PSC / (PSC + 1) / (ARR + 1)
Freq =72M/(PSC + 1) / (ARR + 1)=1/20(ms)=50Hz
周期20ms ARR设为20K 那么PSC设置为72M。
PWM占空比: Duty = CCR / (ARR + 1)
那我们就可以通过设置CCR的值来改变舵机的角度。
三、相关代码的编写
void PWM_Init(void)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_InternalClockConfig(TIM2);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1; //ARRTIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1; //PSCTIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse = 0; //CCRTIM_OC2Init(TIM2, &TIM_OCInitStructure);TIM_Cmd(TIM2, ENABLE);
}void PWM_SetCompare2(uint16_t Compare)
{TIM_SetCompare2(TIM2, Compare);
}void Servo_Init(void)
{PWM_Init();
}void Servo_SetAngle(float Angle)
{PWM_SetCompare2(Angle / 180 * 2000 + 500);
}int main(void)
{OLED_Init();Servo_Init();Key_Init();OLED_ShowString(1, 1, "Angle:");while (1){KeyNum = Key_GetNum();if (KeyNum == 1){Angle += 30;if (Angle > 180){Angle = 0;}}Servo_SetAngle(Angle);OLED_ShowNum(1, 7, Angle, 3);}
}void PWM_Init(void),根据前面几章配置。
TIM_OCInitStructure.TIM_Pulse = 0; //CCR,初始化为0,后面通过void PWM_SetCompare2(uint16_t Compare)来改变。
void Servo_SetAngle(float Angle)封装了一个函数,也可以不封装。
四、程序现象
没按下一次按钮,舵机都会转动30°,要是超过最大限度180°,就归0.
At the end of this article, applaud yourself again!!

)




