一、核心技术能力
-
高精度力反馈
Virtuose 6D系列设备提供0.01-10N范围的六维力反馈(分辨率0.1N & 0.1mm)通过应变片传感器与磁流变阻尼器协同,实现5ms超低延迟闭环控制。
柔性关节采用主动阻抗控制算法,维持0.5-2N/mm接触刚度,保障精密操作安全性支持6自由度运动捕捉,实时转化操作者手部动作至机械臂精细控制。
2.跨场景适应技术
时延补偿:基于波变量理论建立虚拟弹簧阻尼模型,解决火星探测等远距离任务中的信号延迟问题。
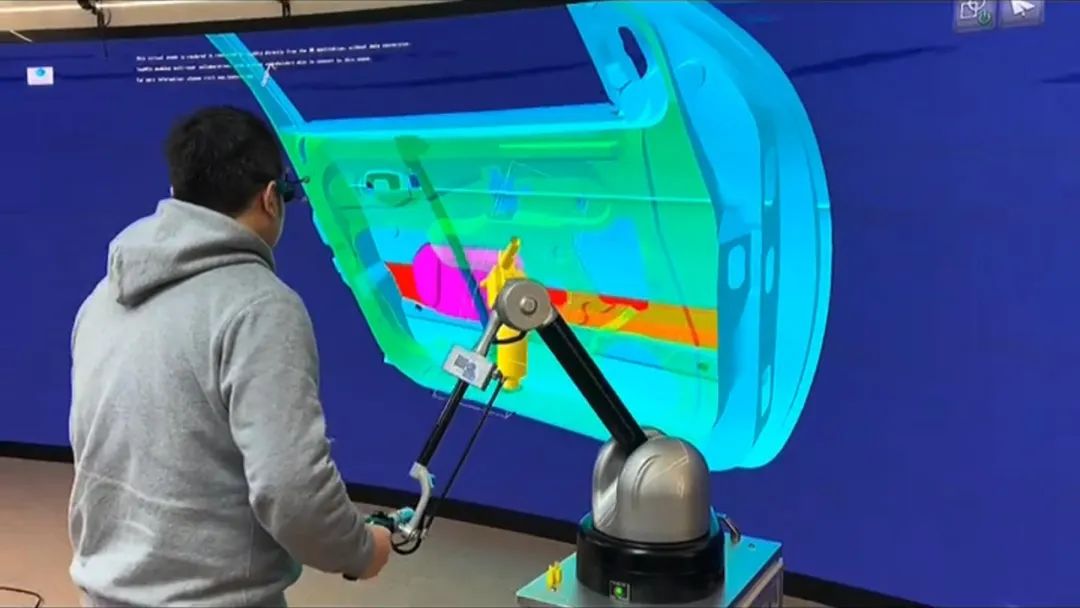
多模态交互:与VR/AR融合(如SurgicalAR系统),结合视觉增强与力反馈,提升肿瘤切除等复杂任务精度。


二、核心组件与功能
1.硬件系统
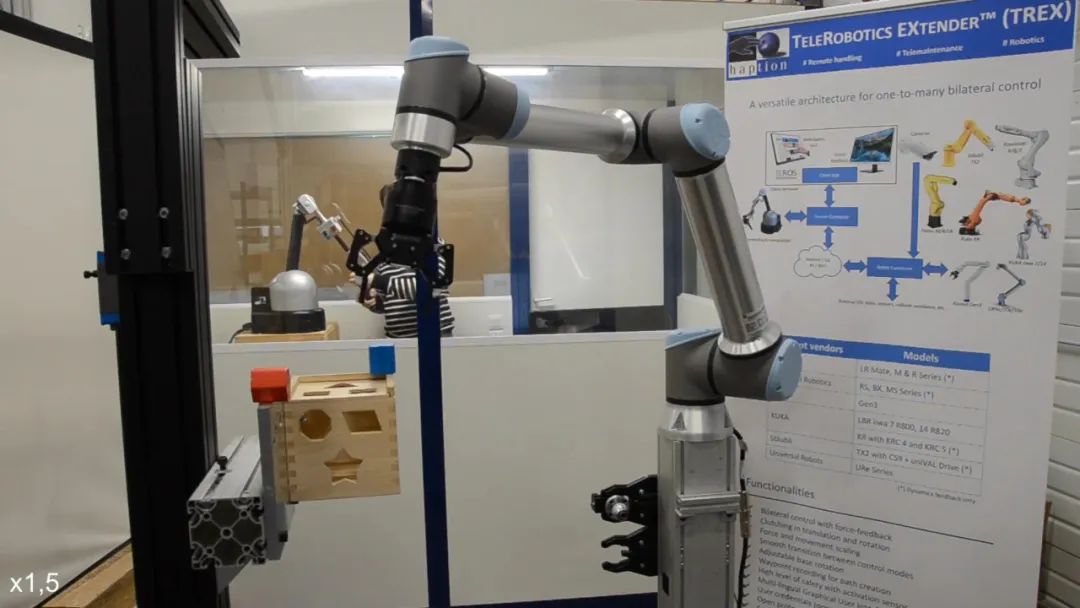
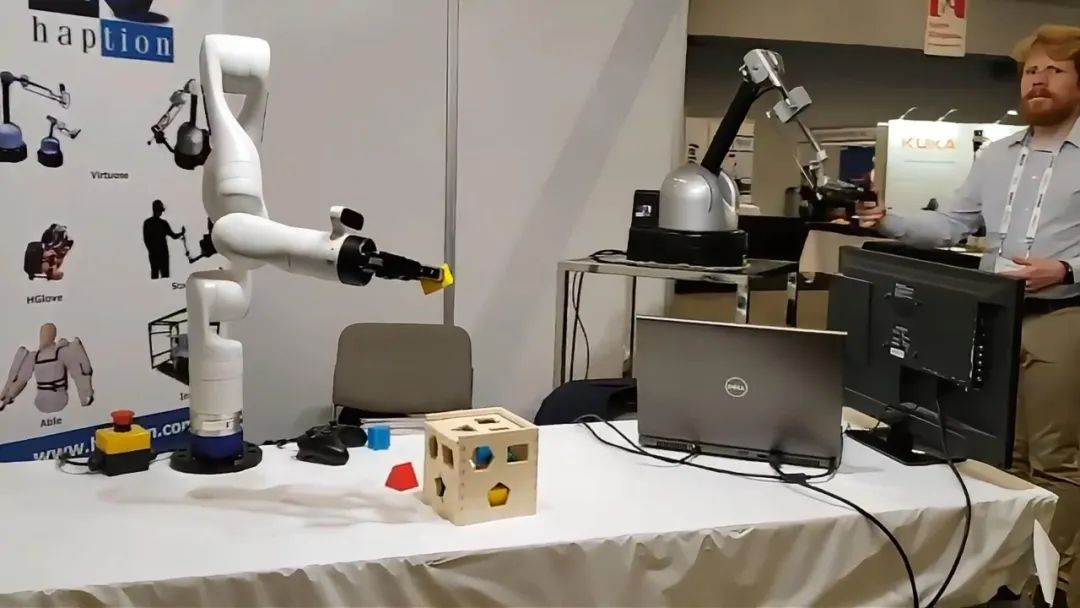
Virtuose 6D TAO:7自由度主控设备,标准版与High Force版(力反馈强度3倍提升)分别适配不同负载需求,支持>6kg重型机器人操作。
末端兼容性:可集成UR10e等工业机械臂,实现主从控制。
2.软件框架
Telerobotics Extender (TREX):提供免代码控制、OPC-UA工业通信协议及多语言GUI,实现机器人动作与力反馈的双向同步。
安全机制:手柄感应器实时监测握持状态,松脱时自动关闭机械马达,防止误操作。
三、应用场景及成效
| 领域 | 典型应用 | 核心价值 |
|---|---|---|
| 工业 | 核电站维护、精密装配 | 操作员远程感知接触力与阻力,避免事故并提升装配精度 |
| 医疗 | 远程手术、肿瘤切除模拟 | 力反馈+视觉增强技术提升手术成功率(临床试验验证) |
| 太空/深海 | 航天器维修、深海探测 | 时延补偿算法保障超远距离操作稳定性 |
| 科研教育 | 机器人动力学研究、操作培训 | 提供真实力觉体验,加速技能掌握与理论验证 |
四、方案优势总结
精准性:力反馈模拟真实物理特性(重量、硬度),减少操作误差。
安全性:双重防护(硬件感应+软件协议)保障高危环境作业。
高效性:毫秒级响应与多自由度控制提升复杂任务效率。
扩展性:兼容主流CAD/仿真平台,支持工业4.0标准集成。
注:2025年已实现有线/无线混合通信,适配更灵活场景需求。




