更新一下学习方式,之前一直都是跟着老师敲代码,但是这样会导致中间理解不了,而且有些老师后面改了,是直接在视频中添的字,导致后面检查不出错误。所以,将会以理解为主,代码直接从源码粘贴,上课就主要是理解了。
然后总共是过三遍,上课看视频理解一边,每两个模块会写一篇博客,周末回顾会照着源码敲注释
(最近的视频大多都是1小时多一集,大概一天看一个模块,看4个小时左右)
AT24C02和DS18B20
这两个一个是I2C总线一个是单总线
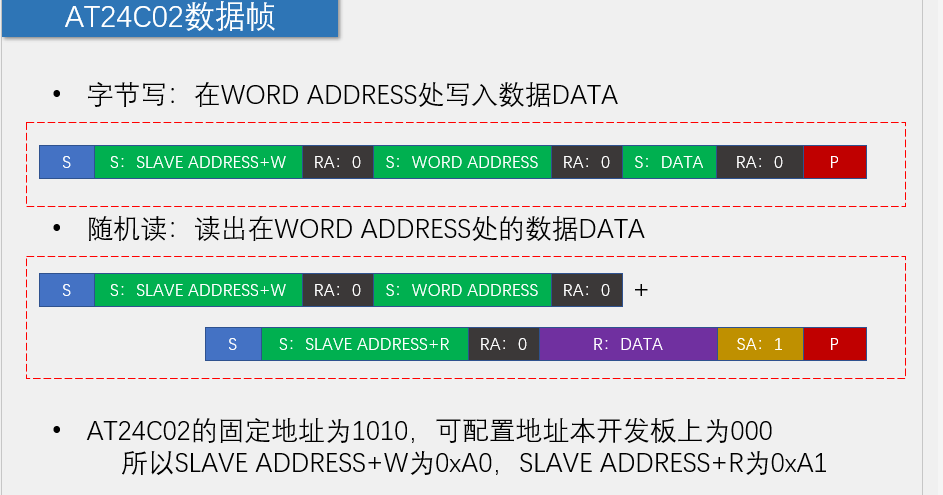
AT24C02
AT24C02是E2PROM,一种存储器,使用I2C总线
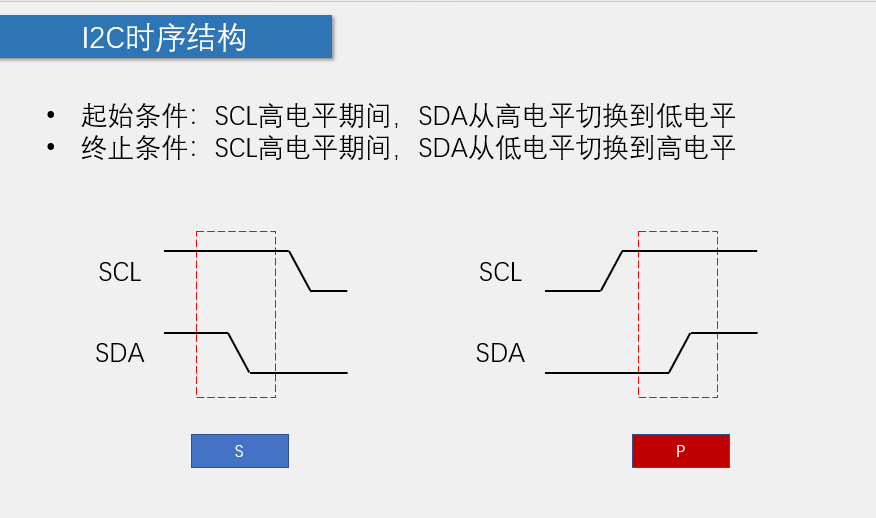
重要的原理是I2C总线的时序结构,后面的代码就是模拟实现
(这里主机从机,一般是单片机做主机,模块做从机)
为了不同模块的衔接,在各个模块中会有多余的赋值操作
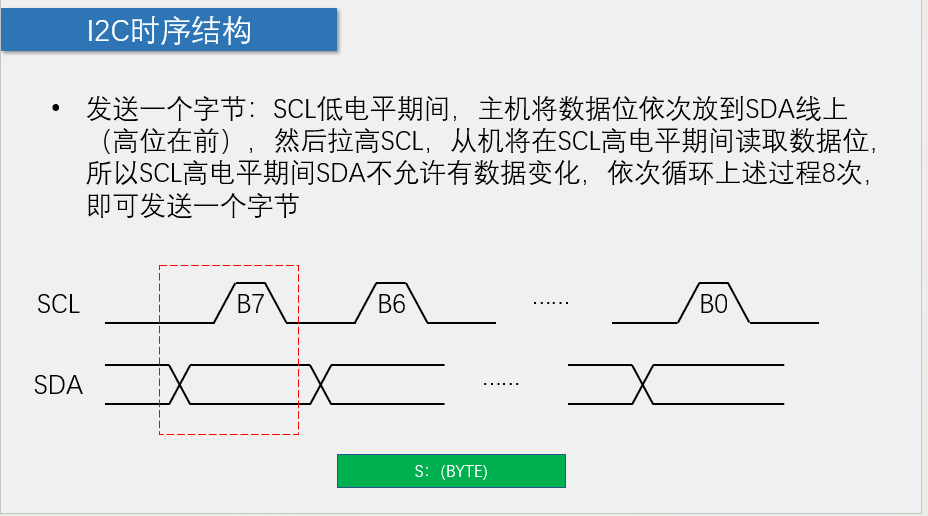
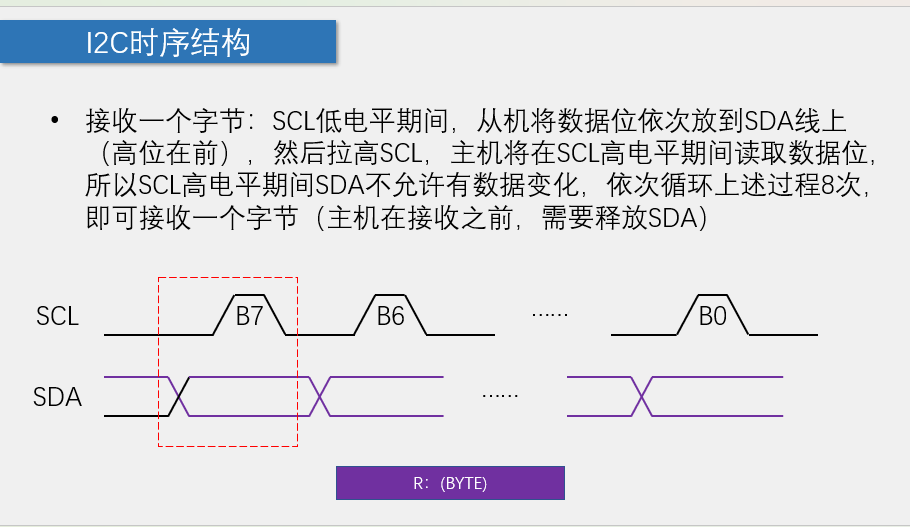
这里发送和接受都是以字节为单位(在接收或者是读取数据时,要读取的数据已经位于线上,例如,这里读取时数据已经位于SDA线上)
(&常用于获取某一位,|常用于赋值某一位)
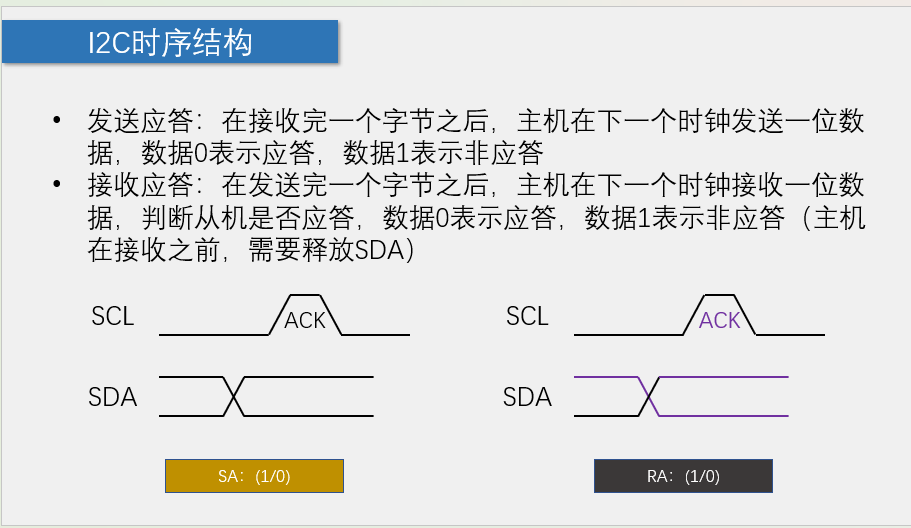
(这里的释放是指置一)
#include <REGX52.H>//引脚定义
sbit I2C_SCL=P2^1;
sbit I2C_SDA=P2^0;/*** @brief I2C开始* @param 无* @retval 无*/
void I2C_Start(void)
{I2C_SDA=1;I2C_SCL=1;I2C_SDA=0;I2C_SCL=0;
}/*** @brief I2C停止* @param 无* @retval 无*/
void I2C_Stop(void)
{I2C_SDA=0;I2C_SCL=1;I2C_SDA=1;
}/*** @brief I2C发送一个字节* @param Byte 要发送的字节* @retval 无*/
void I2C_SendByte(unsigned char Byte)
{unsigned char i;for(i=0;i<8;i++){I2C_SDA=Byte&(0x80>>i);I2C_SCL=1;I2C_SCL=0;}
}/*** @brief I2C接收一个字节* @param 无* @retval 接收到的一个字节数据*/
unsigned char I2C_ReceiveByte(void)
{unsigned char i,Byte=0x00;I2C_SDA=1;for(i=0;i<8;i++){I2C_SCL=1;if(I2C_SDA){Byte|=(0x80>>i);}I2C_SCL=0;}return Byte;
}/*** @brief I2C发送应答* @param AckBit 应答位,0为应答,1为非应答* @retval 无*/
void I2C_SendAck(unsigned char AckBit)
{I2C_SDA=AckBit;I2C_SCL=1;I2C_SCL=0;
}/*** @brief I2C接收应答位* @param 无* @retval 接收到的应答位,0为应答,1为非应答*/
unsigned char I2C_ReceiveAck(void)
{unsigned char AckBit;I2C_SDA=1;I2C_SCL=1;AckBit=I2C_SDA;I2C_SCL=0;return AckBit;
}
在了解了基础模块后,我们就可以发送数据帧
#include <REGX52.H>
#include "I2C.h"#define AT24C02_ADDRESS 0xA0/*** @brief AT24C02写入一个字节* @param WordAddress 要写入字节的地址* @param Data 要写入的数据* @retval 无*/
void AT24C02_WriteByte(unsigned char WordAddress,Data)
{I2C_Start();I2C_SendByte(AT24C02_ADDRESS);I2C_ReceiveAck();I2C_SendByte(WordAddress);I2C_ReceiveAck();I2C_SendByte(Data);I2C_ReceiveAck();I2C_Stop();
}/*** @brief AT24C02读取一个字节* @param WordAddress 要读出字节的地址* @retval 读出的数据*/
unsigned char AT24C02_ReadByte(unsigned char WordAddress)
{unsigned char Data;I2C_Start();I2C_SendByte(AT24C02_ADDRESS);I2C_ReceiveAck();I2C_SendByte(WordAddress);I2C_ReceiveAck();I2C_Start();I2C_SendByte(AT24C02_ADDRESS|0x01);I2C_ReceiveAck();Data=I2C_ReceiveByte();I2C_SendAck(1);I2C_Stop();return Data;
}
AT24C02数据存储
在实现了各个模块后,数据存储就变得简单了
注意在写入时,要delay一段时间,在手册中规定了最短时间
int在C51中是16位,我们无论是发送还是接受都是8位,所以要给他分开
#include <REGX52.H>
#include "LCD1602.h"
#include "Key.h"
#include "AT24C02.h"
#include "Delay.h"unsigned char KeyNum;
unsigned int Num;void main()
{LCD_Init();LCD_ShowNum(1,1,Num,5);while(1){KeyNum=Key();if(KeyNum==1) //K1按键,Num自增{Num++;LCD_ShowNum(1,1,Num,5);}if(KeyNum==2) //K2按键,Num自减{Num--;LCD_ShowNum(1,1,Num,5);}if(KeyNum==3) //K3按键,向AT24C02写入数据{AT24C02_WriteByte(0,Num%256);Delay(5);AT24C02_WriteByte(1,Num/256);Delay(5);LCD_ShowString(2,1,"Write OK");Delay(1000);LCD_ShowString(2,1," ");}if(KeyNum==4) //K4按键,从AT24C02读取数据{Num=AT24C02_ReadByte(0);Num|=AT24C02_ReadByte(1)<<8;LCD_ShowNum(1,1,Num,5);LCD_ShowString(2,1,"Read OK ");Delay(1000);LCD_ShowString(2,1," ");}}
}
秒表(定时器扫描数码管)
在这里老师更新了按键的实现,之前使用delay加while死循环过滤按键的震动,会出现按下后主函数无法进行(卡在死循环),这里使用定时器扫描按键就避免了这种情况,同时可以选择实现按下释放还是松开释放
#include <REGX52.H>
#include "Delay.h"unsigned char Key_KeyNumber;/*** @brief 获取按键键码* @param 无* @retval 按下按键的键码,范围:0,1~4,0表示无按键按下*/
unsigned char Key(void)
{unsigned char Temp=0;Temp=Key_KeyNumber;Key_KeyNumber=0;return Temp;
}/*** @brief 获取当前按键的状态,无消抖及松手检测* @param 无* @retval 按下按键的键码,范围:0,1~4,0表示无按键按下*/
unsigned char Key_GetState()
{unsigned char KeyNumber=0;if(P3_1==0){KeyNumber=1;}if(P3_0==0){KeyNumber=2;}if(P3_2==0){KeyNumber=3;}if(P3_3==0){KeyNumber=4;}return KeyNumber;
}/*** @brief 按键驱动函数,在中断中调用* @param 无* @retval 无*/
void Key_Loop(void)
{static unsigned char NowState,LastState;LastState=NowState; //按键状态更新NowState=Key_GetState(); //获取当前按键状态//如果上个时间点按键按下,这个时间点未按下,则是松手瞬间,以此避免消抖和松手检测if(LastState==1 && NowState==0){Key_KeyNumber=1;}if(LastState==2 && NowState==0){Key_KeyNumber=2;}if(LastState==3 && NowState==0){Key_KeyNumber=3;}if(LastState==4 && NowState==0){Key_KeyNumber=4;}
}
可能有人对于Key的实现有疑问,为什么不直接返回KeyNumber?因为我们需要给它恢复0的状态,所以需要额外设置变量
数码管也进行了更新
添加数组Buf是为了后面显示用的,表示第i位上的数字
#include <REGX52.H>
#include "Delay.h"//数码管显示缓存区
unsigned char Nixie_Buf[9]={0,10,10,10,10,10,10,10,10};//数码管段码表
unsigned char NixieTable[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x00,0x40};/*** @brief 设置显示缓存区* @param Location 要设置的位置,范围:1~8* @param Number 要设置的数字,范围:段码表索引范围* @retval 无*/
void Nixie_SetBuf(unsigned char Location,Number)
{Nixie_Buf[Location]=Number;
}/*** @brief 数码管扫描显示* @param Location 要显示的位置,范围:1~8* @param Number 要显示的数字,范围:段码表索引范围* @retval 无*/
void Nixie_Scan(unsigned char Location,Number)
{P0=0x00; //段码清0,消影switch(Location) //位码输出{case 1:P2_4=1;P2_3=1;P2_2=1;break;case 2:P2_4=1;P2_3=1;P2_2=0;break;case 3:P2_4=1;P2_3=0;P2_2=1;break;case 4:P2_4=1;P2_3=0;P2_2=0;break;case 5:P2_4=0;P2_3=1;P2_2=1;break;case 6:P2_4=0;P2_3=1;P2_2=0;break;case 7:P2_4=0;P2_3=0;P2_2=1;break;case 8:P2_4=0;P2_3=0;P2_2=0;break;}P0=NixieTable[Number]; //段码输出
}/*** @brief 数码管驱动函数,在中断中调用* @param 无* @retval 无*/
void Nixie_Loop(void)
{static unsigned char i=1;Nixie_Scan(i,Nixie_Buf[i]);i++;if(i>=9){i=1;}
}
主函数中中断函数的使用也很巧妙,这个只能是个人体悟了吧
#include <REGX52.H>
#include "Timer0.h"
#include "Key.h"
#include "Nixie.h"
#include "Delay.h"
#include "AT24C02.h"unsigned char KeyNum;
unsigned char Min,Sec,MiniSec;
unsigned char RunFlag;void main()
{Timer0_Init();while(1){KeyNum=Key();if(KeyNum==1) //K1按键按下{RunFlag=!RunFlag; //启动标志位翻转}if(KeyNum==2) //K2按键按下{Min=0; //分秒清0Sec=0;MiniSec=0;}if(KeyNum==3) //K3按键按下{AT24C02_WriteByte(0,Min); //将分秒写入AT24C02Delay(5);AT24C02_WriteByte(1,Sec);Delay(5);AT24C02_WriteByte(2,MiniSec);Delay(5);}if(KeyNum==4) //K4按键按下{Min=AT24C02_ReadByte(0); //读出AT24C02数据Sec=AT24C02_ReadByte(1);MiniSec=AT24C02_ReadByte(2);}Nixie_SetBuf(1,Min/10); //设置显示缓存,显示数据Nixie_SetBuf(2,Min%10);Nixie_SetBuf(3,11);Nixie_SetBuf(4,Sec/10);Nixie_SetBuf(5,Sec%10);Nixie_SetBuf(6,11);Nixie_SetBuf(7,MiniSec/10);Nixie_SetBuf(8,MiniSec%10);}
}/*** @brief 秒表驱动函数,在中断中调用* @param 无* @retval 无*/
void Sec_Loop(void)
{if(RunFlag){MiniSec++;if(MiniSec>=100){MiniSec=0;Sec++;if(Sec>=60){Sec=0;Min++;if(Min>=60){Min=0;}}}}
}void Timer0_Routine() interrupt 1
{static unsigned int T0Count1,T0Count2,T0Count3;TL0 = 0x18; //设置定时初值TH0 = 0xFC; //设置定时初值T0Count1++;if(T0Count1>=20){T0Count1=0;Key_Loop(); //20ms调用一次按键驱动函数}T0Count2++;if(T0Count2>=2){T0Count2=0;Nixie_Loop();//2ms调用一次数码管驱动函数}T0Count3++;if(T0Count3>=10){T0Count3=0;Sec_Loop(); //10ms调用一次数秒表驱动函数}
}
就到这里结束了,温度传感器下一篇再写了,太长了....





