机器人阻抗控制中的机械阻抗模型主要涉及到通过修改机器人与环境接触作业的动力学模型,使其等效为一个期望的阻抗(弹簧-质量-阻尼)模型。以下是对机械阻抗模型在机器人阻抗控制中的详细解释:
- 阻抗控制原理:
- 机器人阻抗控制旨在通过调整机器人的行为,以维持一个由弹簧-阻尼-质量组成的二阶系统的理想动态关系。
- 这种控制方法不是直接控制机器人的运动或其与外界的接触力,而是控制这二者之间的动态关系。
- 机械阻抗模型:
- 机械阻抗模型可以理解为期望阻抗模型,它描述了机器人末端位置与接触力之间的动态关系。
- 阻抗控制通过调节惯性、阻尼、刚度参数来实现对机器人末端位置与接触力的关系的调整。
- 其中,刚度参数(K)决定了机器人的刚性程度,较大的刚度使机器人对外界力的响应更迅速;而阻尼参数(D)则控制机器人在受力时的能量耗散程度,较大的阻尼减小了振荡的风险。
- 阻抗控制方法:
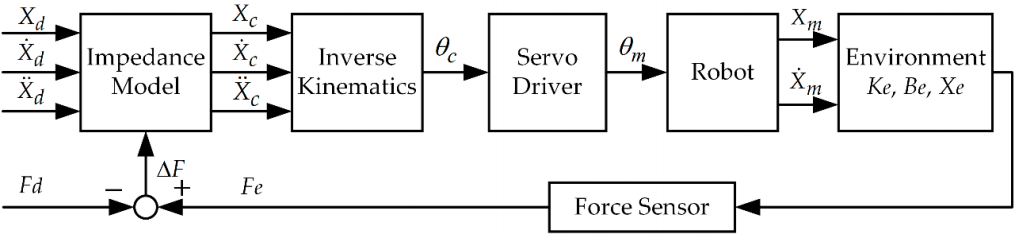
- 控制系统通常由内部的力闭环控制和外部的阻抗计算(位置控制)环节组成。
- 根据系统的期望运动状态、实际运动状态以及期望阻抗模型参数,计算出作用在机器人末端的参考力。
- 通过力控制器使机器人与环境之间的实际作用力跟踪该期望接触力,从而实现机器人与环境的等效模型为期望阻抗模型。
- 阻抗控制分类:
- 根据控制的空间不同,阻抗控制可分为关节空间阻抗控制和笛卡尔空间阻抗控制。
- 关节空间阻抗控制关注机器人的每个关节都体现出由弹簧-阻尼-质量组成的二阶系统的动态特性。
- 笛卡尔空间阻抗控制则关注机器人末端执行器在笛卡尔空间内的每个方向上都体现出这种动态特性。
- 根据控制的空间不同,阻抗控制可分为关节空间阻抗控制和笛卡尔空间阻抗控制。
- 实现阻抗控制的要求:
- 对于关节空间阻抗控制,需要精确的机器人运动学与动力学模型、关节角及角速度反馈、关节转矩控制以及(非必须的)外力矩的测量。
- 对于笛卡尔空间阻抗控制,还需要在线求解雅克比矩阵的(伪)逆矩阵及其导数矩阵,以及精确测量机器人执行器末端受到的外力。
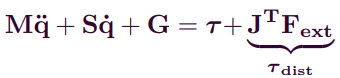
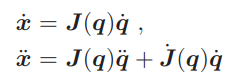
机器人动力学


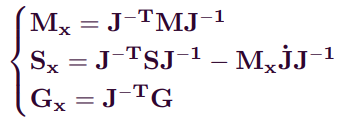
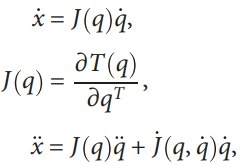
笛卡尔空间描述:
![]()
机器人与环境交互的期望阻抗模型

为了避免测量外力,将设计的惯量矩阵设置为机器人的固有惯量矩阵
![]()
![]()

把机器人末端移动至定点,然后定点调节:
![]()
因此,简化了阻抗控制:
![]()
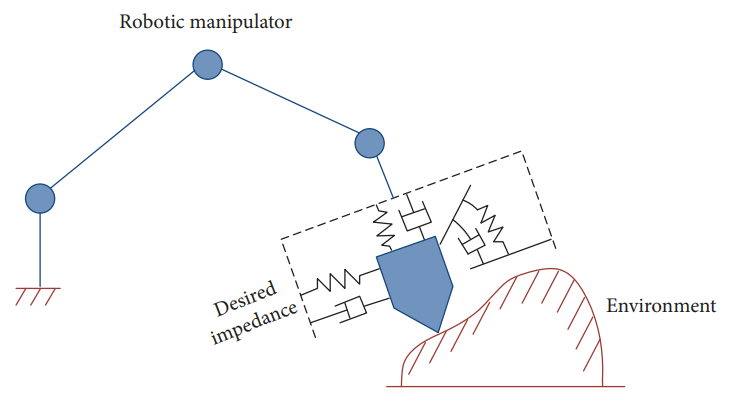
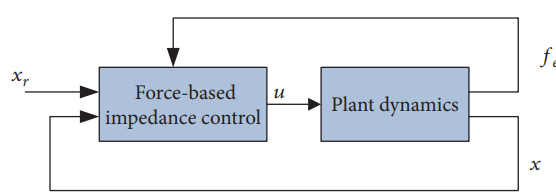
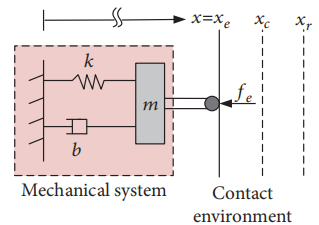
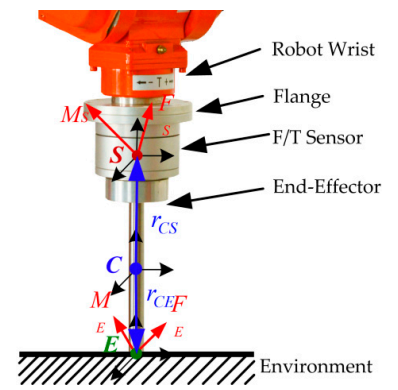
机器人与外部环境接触的阻抗控制描述
![]()
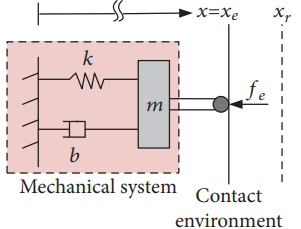
系统动力学与外部环境的接触。坐标xe表示环境的位置,坐标xr表示在接触环境内应稍微稍微保持接触的参考平衡轨迹。位置误差等于实际位置(x)和参考位置(xr)之间的差值;此误差应保证与环境的柔顺接触
![]()
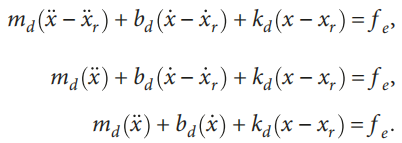
将阻抗模型带入到机器人动力学模型中,可以求出控制律:

考虑期望质量等于机器人实际质量的情况,消去了接触力的测量:
![]()
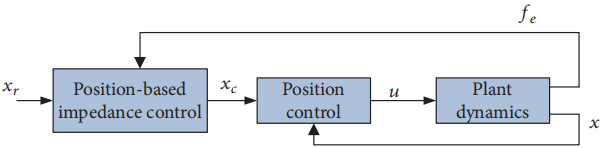
系统动力学与外部环境的接触。由于添加了命令阻抗轨迹xc,阻抗目标动力学原理发生了变化
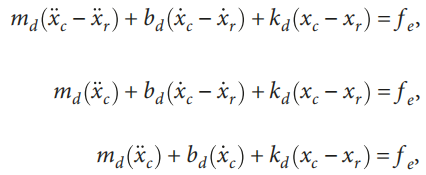
![]()
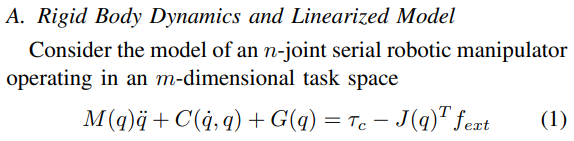
Active Impedance Control of Bioinspired Motion Robotic
Manipulators: An Overview
——————————————————————————————
![]()

![]()
采用下面的控制律去线性化(1)
![]()
![]()
![]()
![]()
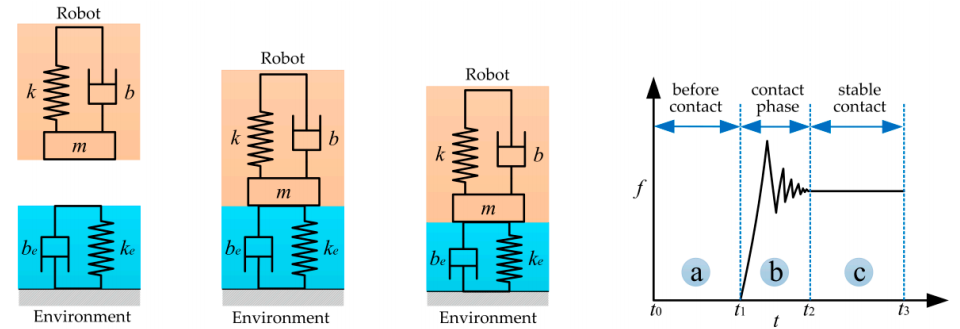
阻抗控制
![]()
![]()
![]()
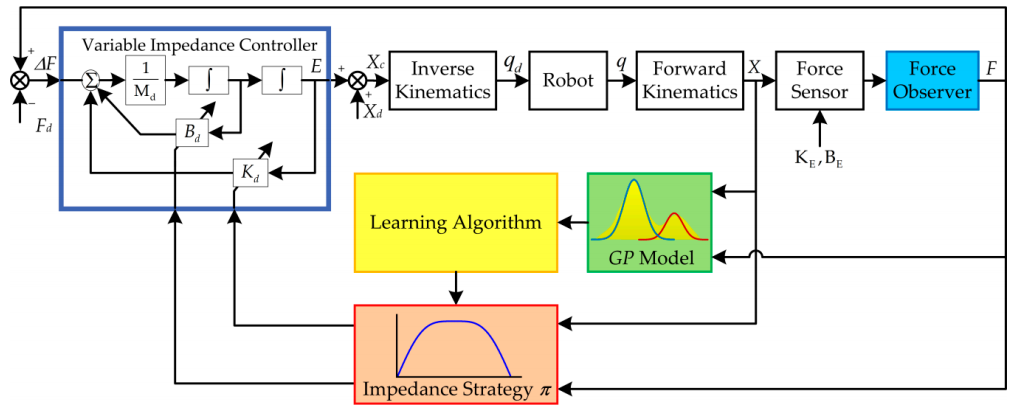
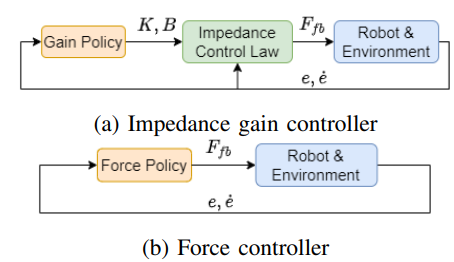
Efficient Force Control Learning System for Industrial
Robots Based on Variable Impedance Control
![]()
![]()
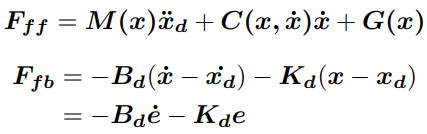
设定Md=M(x)
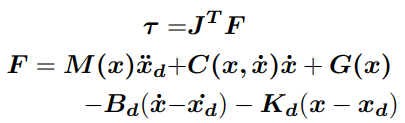
阻抗控制律可以分为两个部分:Fff为前馈项用于取消机器人动力学的非线性。Ffb为反馈项用于跟踪期望轨迹!
Learning Variable Impedance Control via Inverse Reinforcement Learning for Force-Related Tasks
————————————————————————————
![]()
![]()
![]()

![]()
————————————————————————————
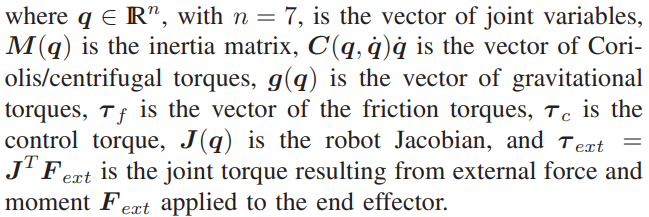
The dynamic model of the robot has the form:
![]()
Cartesian impedance control techniques for torque controlled light-weight robots
Cartesian impedance control of redundant manipulators for human-robot co-manipulation
————————————————————————————————
![]()
![]()
![]()
![]()

![]()

![]()

![]()







