CV部分复习【下】
- 12_transformations
- 13_homographies
- 14_cameras_I
- 15_cameras_II
12_transformations
-
图像变换的两种类型:
- filtering
- warping

-
scale缩放:其中uniform scaling缩放比例相同

-
shear剪切:

-
rotation旋转及推导


-
可以统一写成矩阵乘法形式
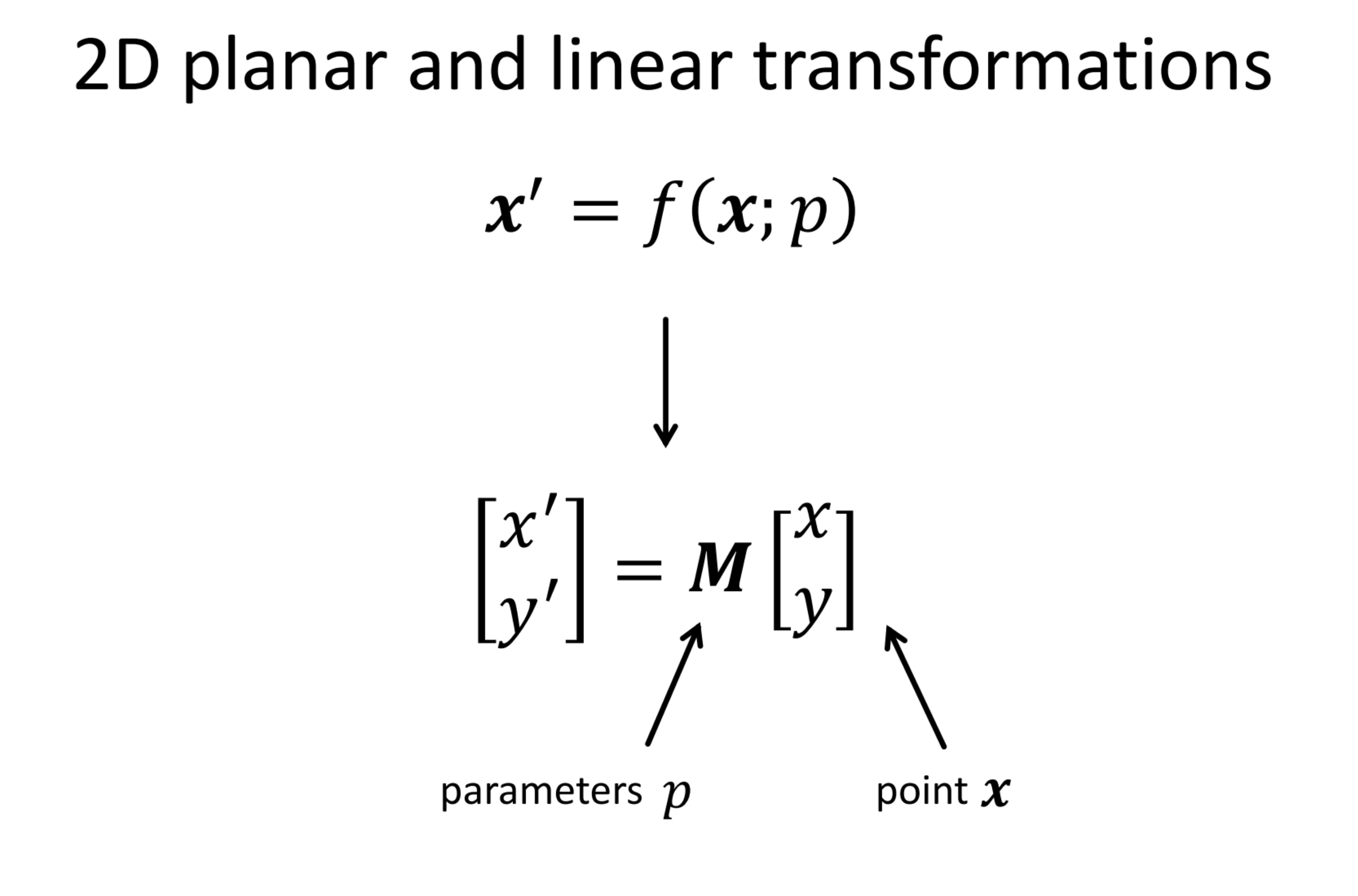

-
2D平移:无法用2*2的矩阵进行刻画

=>引入射影几何(Projective geometry) -
同态坐标系:2D变3D,加一, 只要缩放比例一致,不同的3D向量对应同一个2D点

-
在同态坐标系表示2D平移:

-
同态、非同态转换及可视化:


-
投影几何图形中的变换:

-
操作可以用矩阵连乘表示:顺序重要,图中应该是scale\rotation\translation的顺序

-
2D变换分类及自由度:

-
translation: 2dof

-
Euclidean(rigid): rotation + translation,3dof

-
similarity: uniform scaling + rotation + translation,4dof

-
affine transform: uniform scaling + shearing + rotation + translation,6dof

affine性质:

-
射影变换(也称为单应性变换 ):8dof

看起来9个元素,为什么8dof?同态坐标系的缩放不变性,可以任选一个非零元素进行归一化。
-
-
确定未知(仿射)2D 变换:6dof,每对对应点给出两个等式,需要3对点

- 优化目标:

- 矩阵形式,及A,b,x的确定


- 优化目标:






