在技术领域中,技术文档不仅是团队协作和知识传承的重要工具,也是推动项目成功和提高效率的关键要素。然而,编写一份优秀的技术文档确实是一项需要深思熟虑的挑战。本文给出一些关于如何提升技术文档质量的关键点和实用建议,希望能为文档编写之路提供一些启发。
文章目录
- 清晰的目标与受众定位
- 合理的结构与层次化设计
- 图文并茂,适度使用视觉元素
- 简洁明了的语言
- 高质量的代码示例
- 卡尔曼滤波核心公式
- 变量说明
- 代码关键实现
- 离散时间模型
- 噪声处理
- 定期更新与版本管理
- 收集反馈并持续改进
- 借助工具提升文档质量
- 总结
清晰的目标与受众定位
在编写技术文档之前,必须明确:
- 目标是什么? 是为了指导开发者、帮助用户操作,还是作为内部的知识库?
- 受众是谁? 是技术背景深厚的开发者,还是非技术人员?受众的技术水平决定了文档的语言风格、详细程度和内容组织。
建议:
- 使用简单直接的语言,避免不必要的术语(除非受众明确需要)。
- 通过列出受众可能遇到的问题,确保文档内容与他们的需求高度匹配。
合理的结构与层次化设计
一个良好的文档结构可以帮助读者快速找到所需信息。常见的文档结构包括:
- 概述部分:提供背景信息和文档目的。
- 快速上手:为新手提供最小化的操作步骤。
- 深入解析:详细讲解技术实现、架构设计等。
- FAQ或故障排查:针对常见问题提供答案。
- 附录:包括术语表、参考链接等补充信息。
建议:
- 使用标题和小标题清晰分隔内容。
- 添加目录和导航链接,方便快速跳转。
- 尽量将内容模块化,避免冗长的段落。
图文并茂,适度使用视觉元素
技术文档不仅是文字的堆砌,适当的图片、图表和代码示例可以极大提升可读性。例如:
- 流程图:展示系统架构或数据流动。
- 示意图:解释复杂的概念或关系。
- 代码块:提供完整的代码示例和注释。
建议:
- 确保所有视觉元素都清晰可辨,避免模糊或低分辨率图片。
- 使用统一的标注风格,例如箭头、颜色区分等,保持视觉一致性。
简洁明了的语言
技术文档不是文学作品,避免使用复杂句式和模糊表达。应追求:
- 简洁:句子越短越好,避免堆砌。
- 直白:直接告诉读者“该做什么”和“为什么这么做”。
- 主动语态:让语句更加清晰有力。
建议:
- 避免使用“可能”、“大概”等模糊词汇,确保表达准确。
- 使用常见的技术术语,但必要时提供定义或链接。
高质量的代码示例
如果技术文档涉及代码编写,代码示例的质量至关重要。优秀的代码示例应具备:
- 可运行性:确保读者复制后能直接运行。
- 注释详尽:每一段代码都应有清晰的注释解释。
- 上下文清晰:说明代码的用途和前置条件。
建议:
- 提供多个语言版本的代码示例(如果适用)。
- 在代码示例前后加上背景说明和结果展示。
代码示例如下:
% 卡尔曼滤波:一维位置跟踪示例% 初始化参数
dt = 1; % 采样时间间隔
A = [1 dt; % 状态转移矩阵0 1];
B = [0; 0]; % 控制输入矩阵(假设无控制输入)
H = [1 0]; % 观测矩阵
Q = [1 0; % 过程噪声协方差0 3];
R = 5; % 测量噪声协方差
x = [0; 0]; % 初始状态 [位置; 速度]
P = eye(2); % 初始状态协方差矩阵% 模拟真实目标和测量值
num_steps = 50;
true_position = zeros(1, num_steps);
measurements = zeros(1, num_steps);
estimated_position = zeros(1, num_steps);% 生成真实的目标轨迹和测量值
for k = 1:num_stepsif k == 1true_position(k) = 0;elsetrue_position(k) = true_position(k-1) + 2 + randn(); % 真实位置endmeasurements(k) = true_position(k) + sqrt(R) * randn(); % 添加测量噪声
end% 卡尔曼滤波
for k = 1:num_steps% 预测步骤x = A * x + B; % 状态预测P = A * P * A' + Q; % 预测协方差% 更新步骤K = P * H' / (H * P * H' + R); % 卡尔曼增益x = x + K * (measurements(k) - H * x); % 更新状态估计P = (eye(2) - K * H) * P; % 更新协方差矩阵% 保存估计值estimated_position(k) = x(1);
end% 绘制结果
figure;
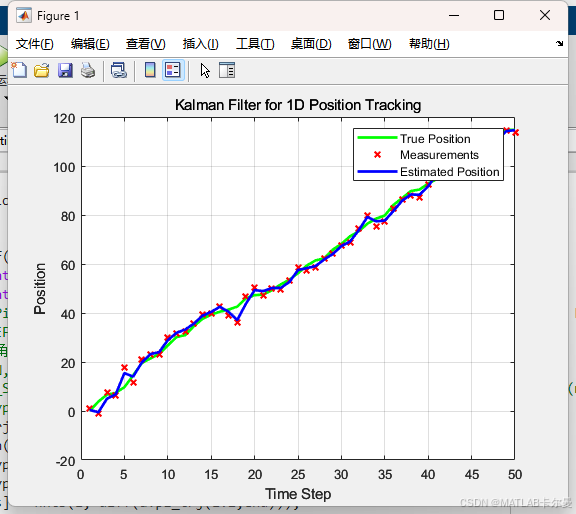
plot(1:num_steps, true_position, '-g', 'LineWidth', 2); hold on;
plot(1:num_steps, measurements, 'rx', 'LineWidth', 1.5);
plot(1:num_steps, estimated_position, '-b', 'LineWidth', 2);
legend('True Position', 'Measurements', 'Estimated Position');
xlabel('Time Step');
ylabel('Position');
title('Kalman Filter for 1D Position Tracking');
grid on;
结果如下:
卡尔曼滤波核心公式
代码中实现的卡尔曼滤波算法涉及以下核心公式,适用于一维位置跟踪场景:
预测步骤(时间更新)
状态预测方程:
x k − = A x k − 1 + B u k \mathbf{x}_k^- = A \mathbf{x}_{k-1} + B \mathbf{u}_k xk−=Axk−1+Buk
协方差预测方程:
P k − = A P k − 1 A T + Q P_k^- = A P_{k-1} A^T + Q Pk−=APk−1AT+Q
更新步骤(测量更新)
卡尔曼增益计算:
K k = P k − H T ( H P k − H T + R ) − 1 K_k = P_k^- H^T (H P_k^- H^T + R)^{-1} Kk=Pk−HT(HPk−HT+R)−1
状态更新方程:
x k = x k − + K k ( z k − H x k − ) \mathbf{x}_k = \mathbf{x}_k^- + K_k (\mathbf{z}_k - H \mathbf{x}_k^-) xk=xk−+Kk(zk−Hxk−)
协方差更新方程:
P k = ( I − K k H ) P k − P_k = (I - K_k H) P_k^- Pk=(I−KkH)Pk−
变量说明
- x \mathbf{x} x:状态向量(包含位置和速度)
- P P P:状态协方差矩阵
- A A A:状态转移矩阵
- B B B:控制输入矩阵
- H H H:观测矩阵
- Q Q Q:过程噪声协方差矩阵
- R R R:测量噪声协方差
- K K K:卡尔曼增益
代码关键实现
以下代码片段对应上述公式:
% 预测步骤
x = A * x + B; % 状态预测
P = A * P * A' + Q; % 协方差预测% 更新步骤
K = P * H' / (H * P * H' + R); % 卡尔曼增益
x = x + K * (measurements(k) - H * x); % 状态更新
P = (eye(2) - K * H) * P; % 协方差更新
离散时间模型
系统采用离散时间模型,状态转移矩阵 A A A包含时间间隔 d t dt dt:
A = [ 1 d t 0 1 ] A = \begin{bmatrix} 1 & dt \\ 0 & 1 \end{bmatrix} A=[10dt1]
噪声处理
过程噪声 Q Q Q和测量噪声 R R R的协方差直接影响滤波效果:
Q = [ 1 0 0 3 ] , R = 5 Q = \begin{bmatrix} 1 & 0 \\ 0 & 3 \end{bmatrix}, \quad R = 5 Q=[1003],R=5
仿真中噪声生成方式:
true_position(k) = true_position(k-1) + 2 + randn();
measurements(k) = true_position(k) + sqrt(R) * randn();
定期更新与版本管理
技术文档的时效性直接影响其价值。随着技术的迭代,文档内容也需要同步更新。
建议:
- 使用版本控制工具(如 Git)管理文档,记录每次更新的变更内容。
- 在文档顶部标注发布日期和版本号,提醒读者信息是否过时。
- 设立维护计划,定期审查文档准确性。
收集反馈并持续改进
最好的技术文档是能不断适应受众需求的文档。通过收集反馈,你可以发现改进的方向。
建议:
- 在文档末尾添加反馈渠道(如表单或邮件地址)。
- 根据读者反馈优化内容,例如补充遗漏的细节或改进难以理解的部分。
- 定期与团队成员或用户进行文档评审。
借助工具提升文档质量
现代工具可以帮助你更高效地编写和管理技术文档。例如:
- 文档生成工具:如 Markdown、Docusaurus、Sphinx 等,适合开发者友好的写作方式。
- 协作工具:如 Notion、Confluence,用于团队共享和实时协作。
- 在线发布平台:如CSDN等,让文档更易于访问、让大家都能看见。
总结
一份优秀的技术文档,既是知识的载体,也是沟通的桥梁。它需要清晰的目标、结构化的内容、简洁的语言以及不断的优化。无论你是经验丰富的技术专家还是初学者,只要坚持以读者为中心,持续打磨文档,你都会成为技术传播的引领者。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者






