本案例是介绍将支持canopen通信协议的机器人机器人接入到西门子Profinet网络中,由于两种协议不能直接通讯,故选择了canopen转Profinet网关进行通讯协议转换。
配置过程:
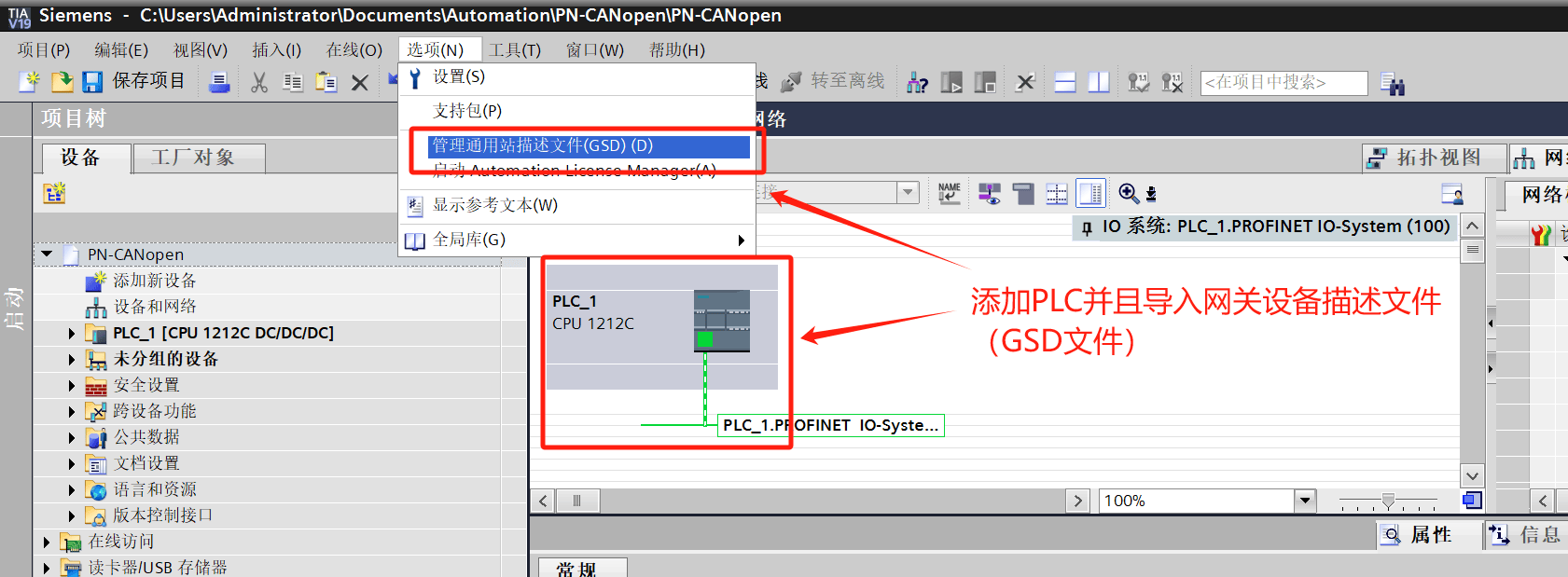
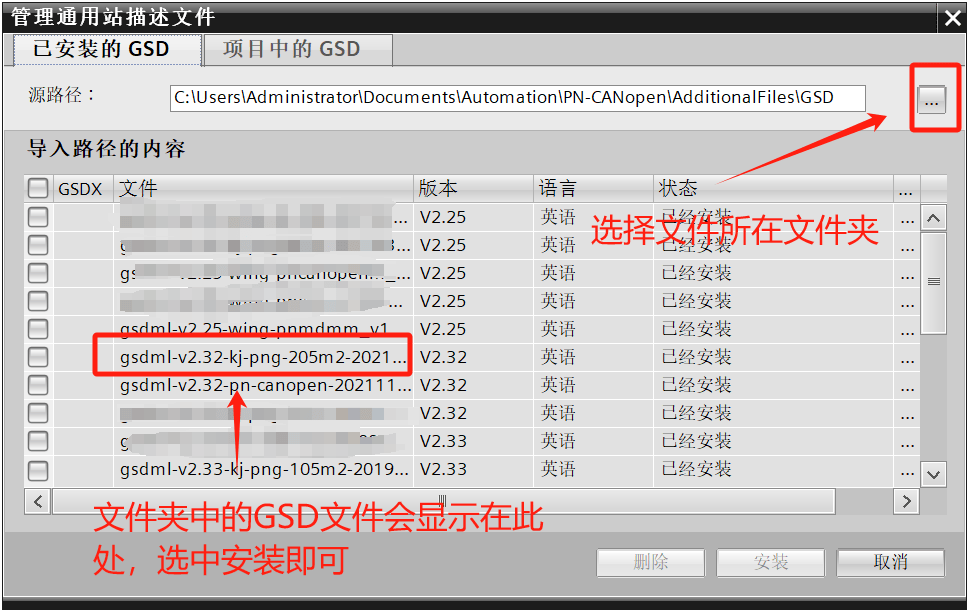
首先打开Profinet主站配置软件,新建项目并导入网关GSD文件。
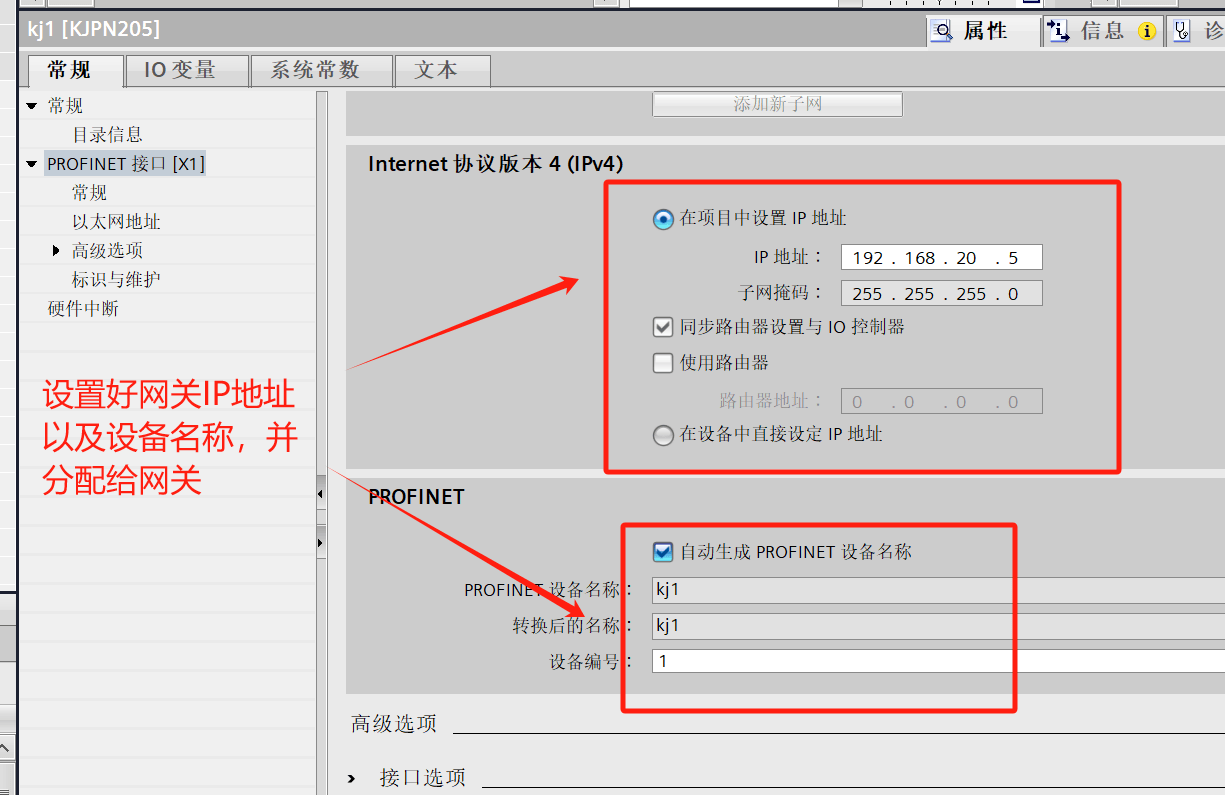
设置好网关作为Profinet从站的设备名称及IP地址
配置输出输出长度以便映射到对应的canopen参数
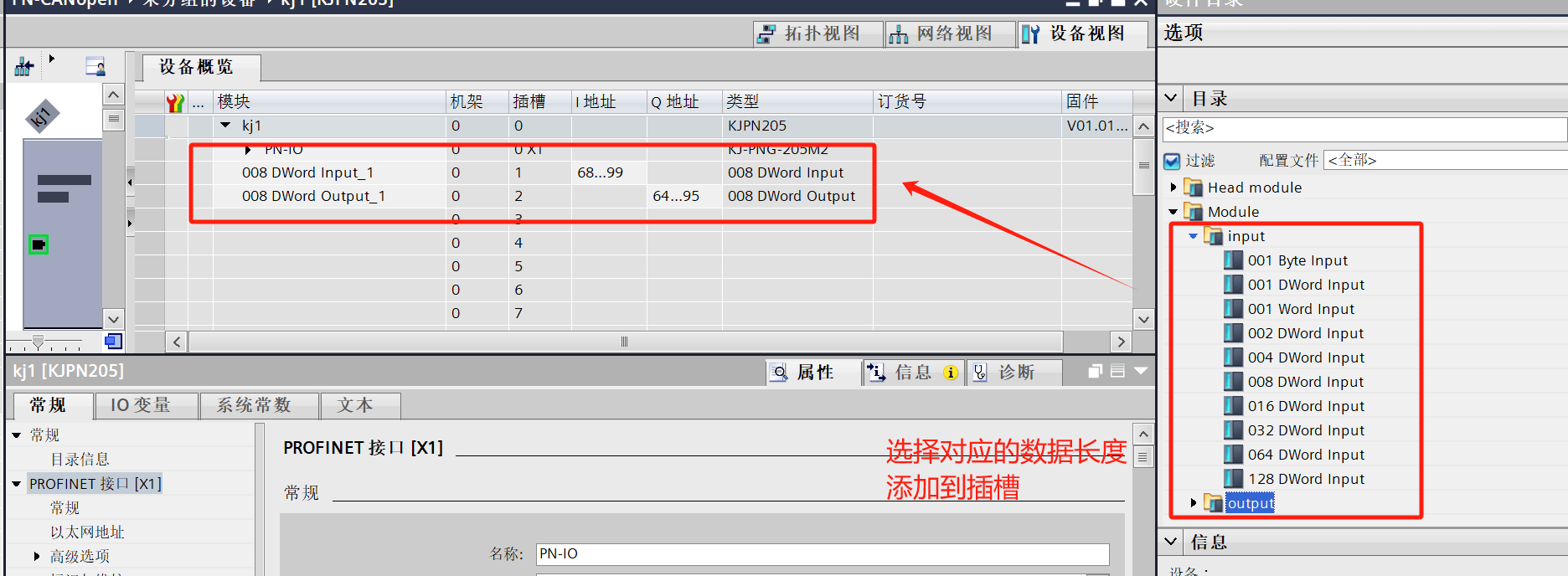
完成组态后将工程下载进入PLC即可完成Profinet侧设置。
Canopen设置
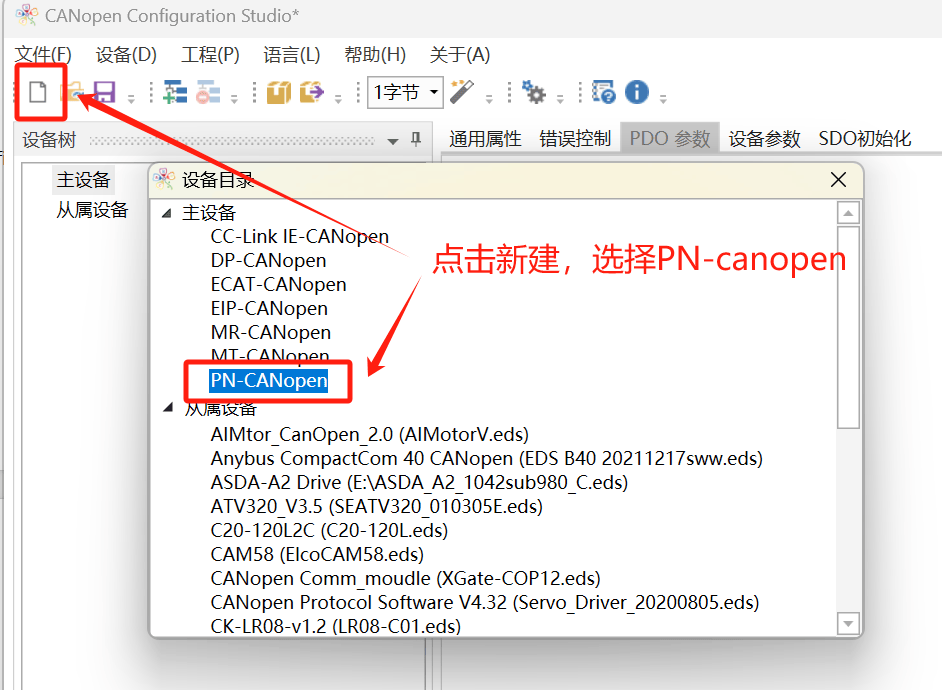
打开网关配置软件“CANopen Configuration Studio”
新建项目选择PN-Canopen
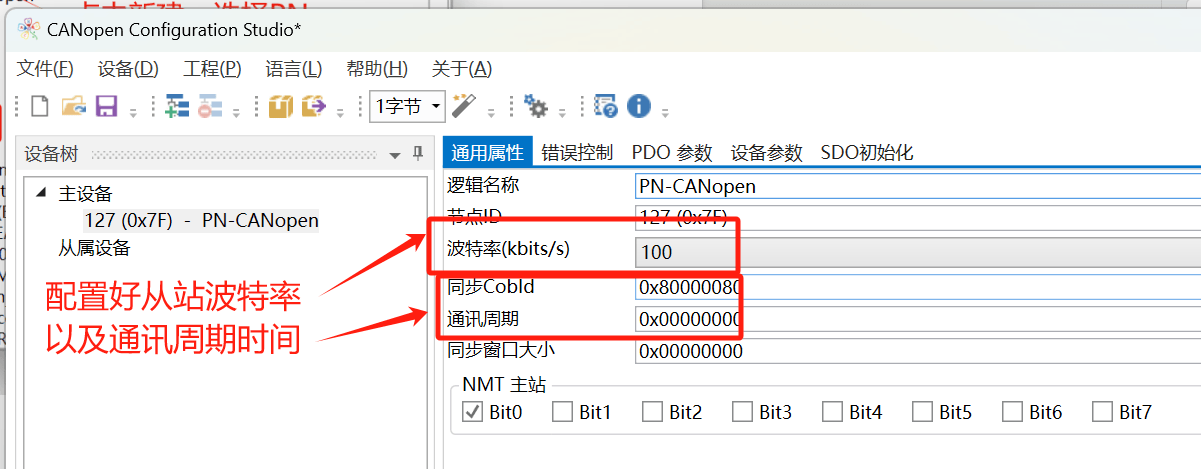
设置通讯波特率,以及通讯周期时间(如果通讯类型采用的不是周期同步则此处可不写)
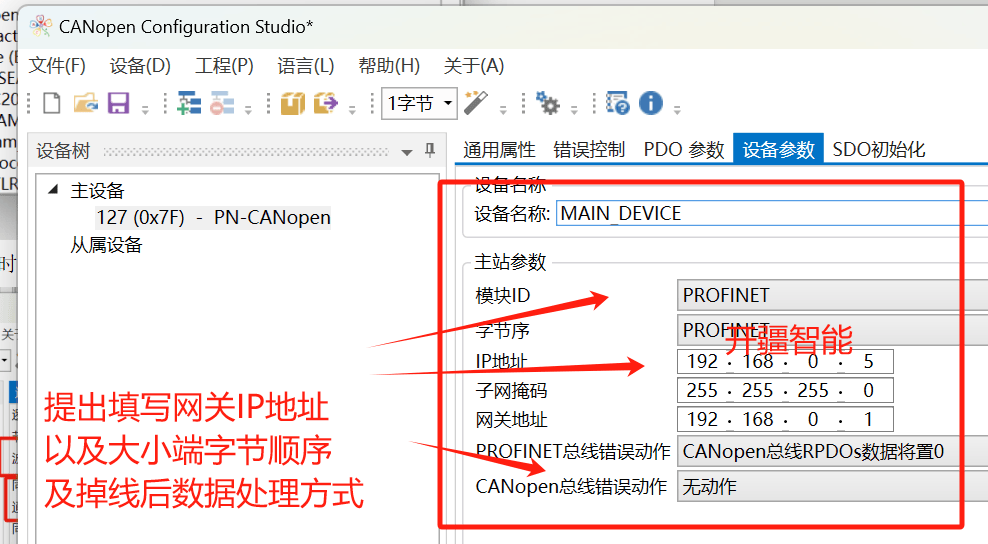
设置网关IP地址以及掉线后的出具处理方式(新版本网关的Profinet参数改为由PLC主站分配,此处IP地址已改为是下载地址)
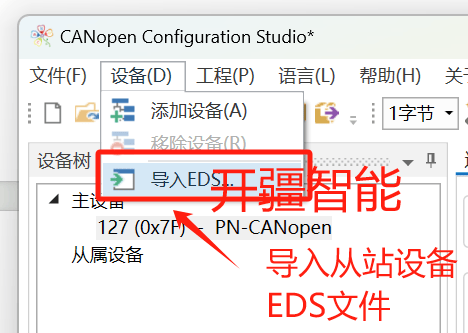
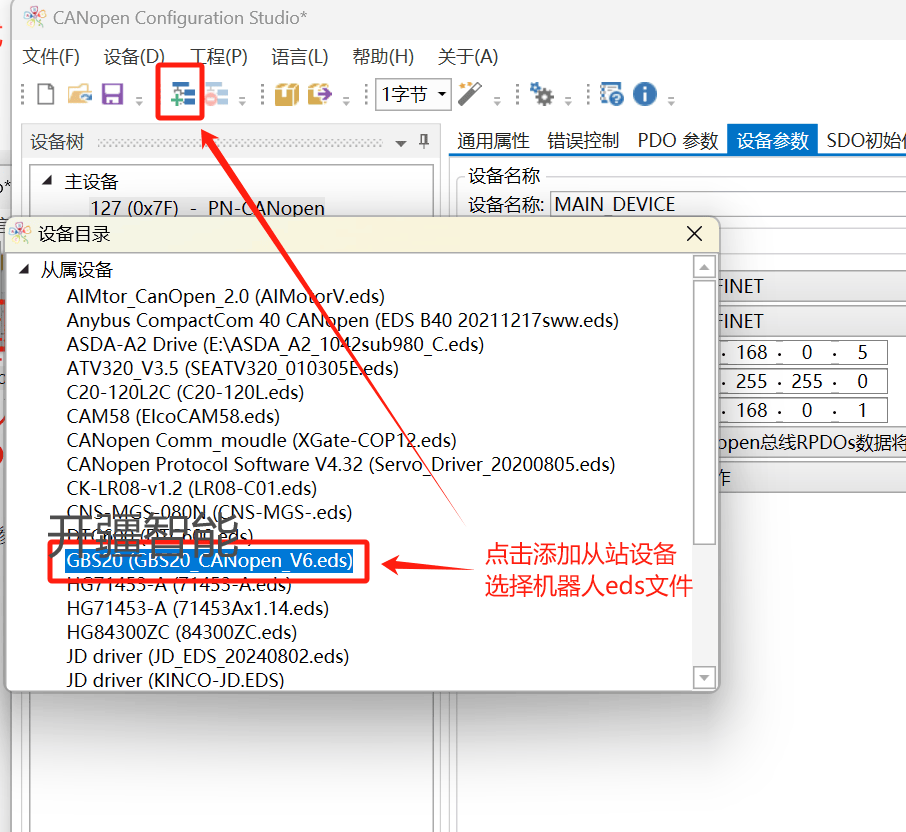
添加Canopen从站模块,并进行参数设置
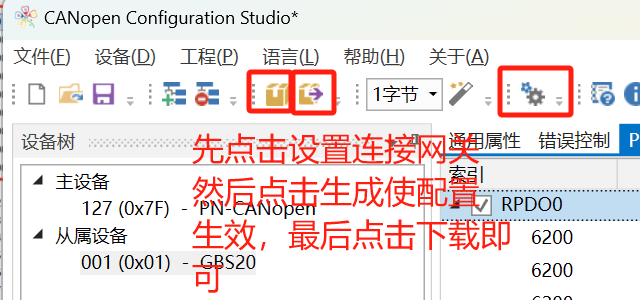
配置完成后首先点击齿轮连接网关IP,然后点击左侧生成,使得配置生效后点击右侧的下载即可
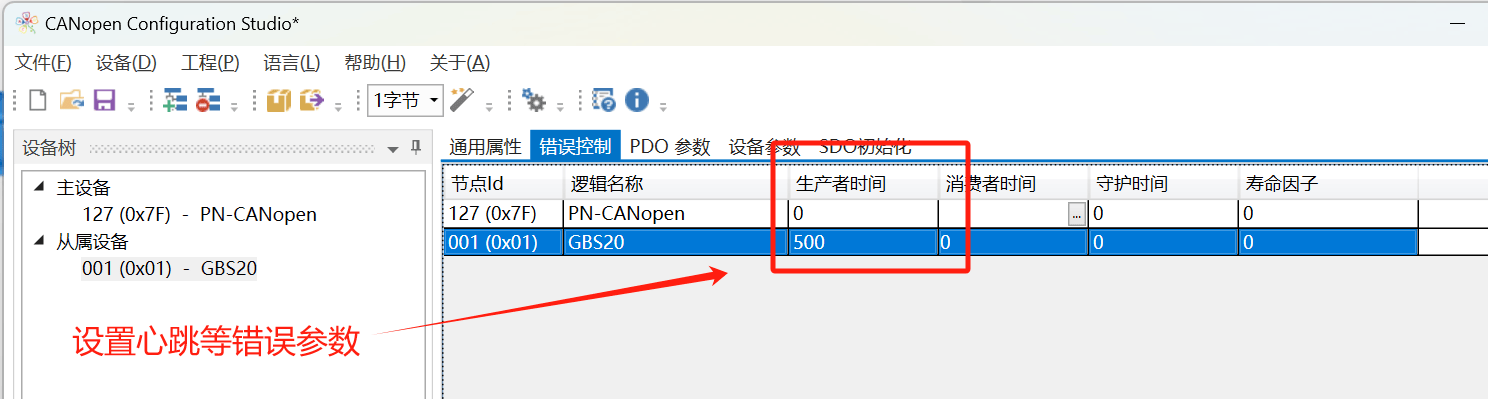
设置心跳,守护等参数
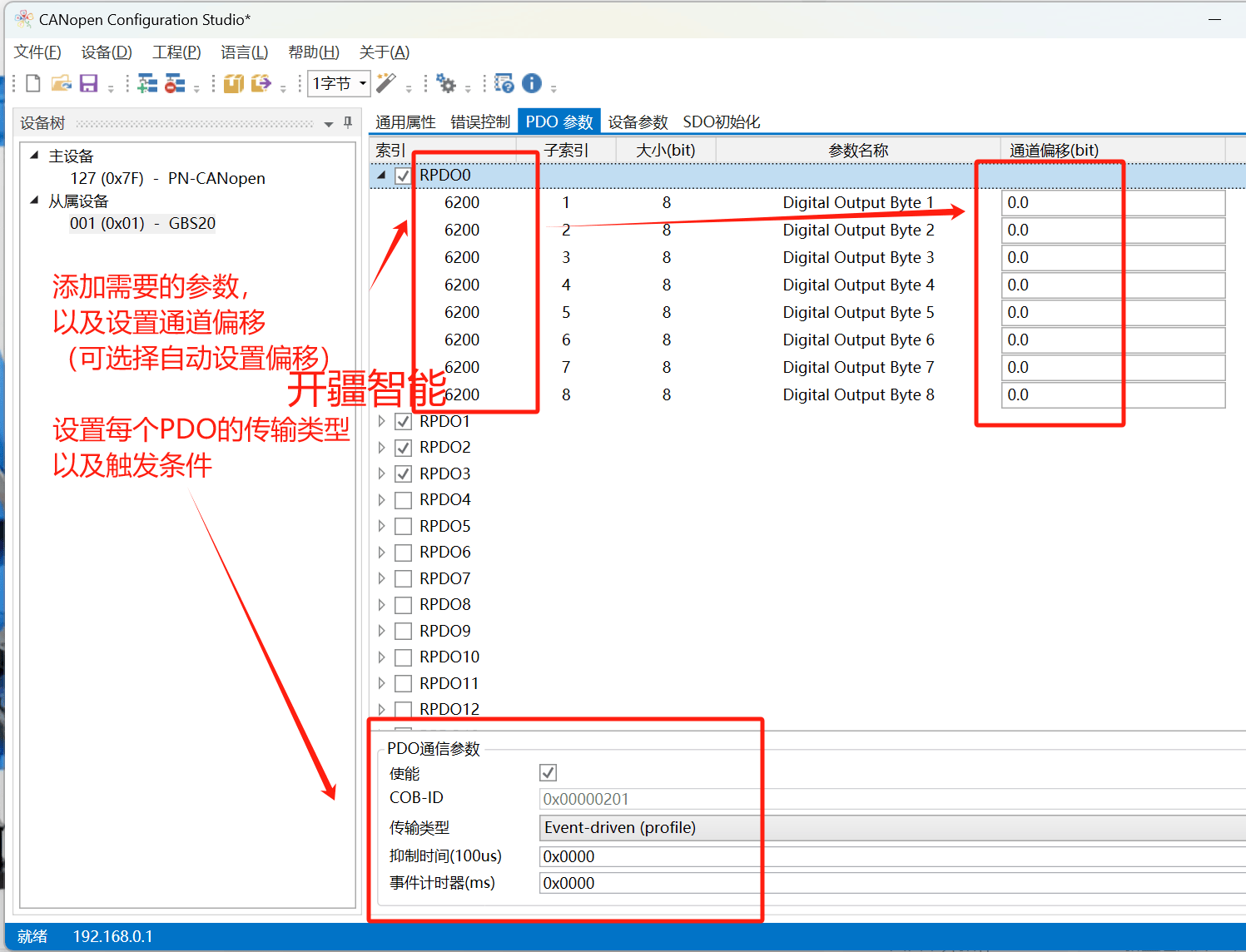
设置PDO参数,报错传输类型等
下载完成后,观察网关指示灯当PWR,SYS灯常亮,OK以及RUN灯常亮后即表示网关正常运行。
以上就是开疆智能Canopen转Profinet网关连接西门子1200PLC以及工博士JI器人配置案例






