本案例是通过开疆智能Profinet转ModbusTCP网关将西门子PLC与ABB机器人进行通讯
因西门子PLC采用Profinet协议,而ABB机器人采用的是ModbusTCP通讯。故采取此种方案。
配置过程:
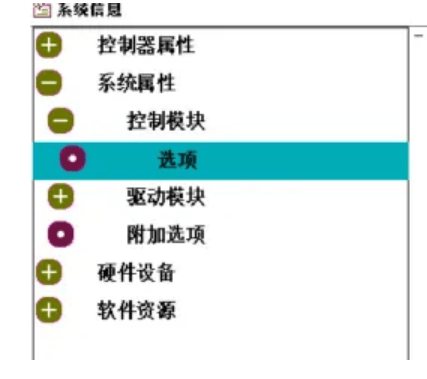
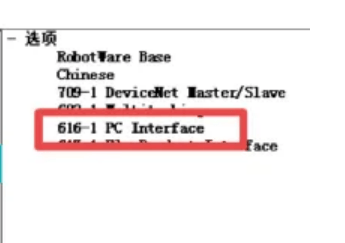
1.MODBUS/TCP基于以太网,故ABB机器人在使用时需要有616-1PCINTERFACE选项。(在机器人主菜单中,选择“系统信息”查看选项)
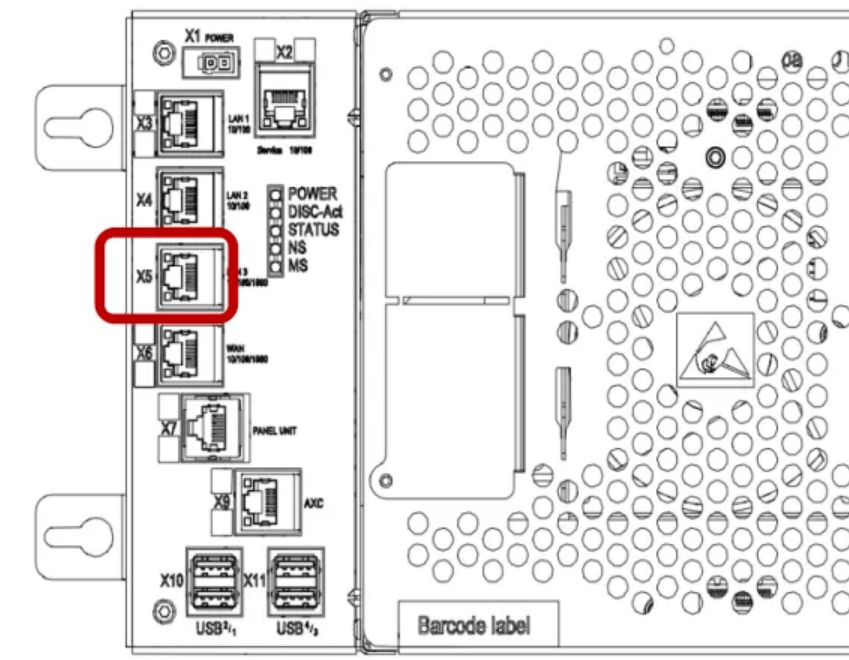
2.MODBUS/TCP通讯介质使用普通网线即可,但是网线连接的是机器人控制器的“X5”网口中。
案例:
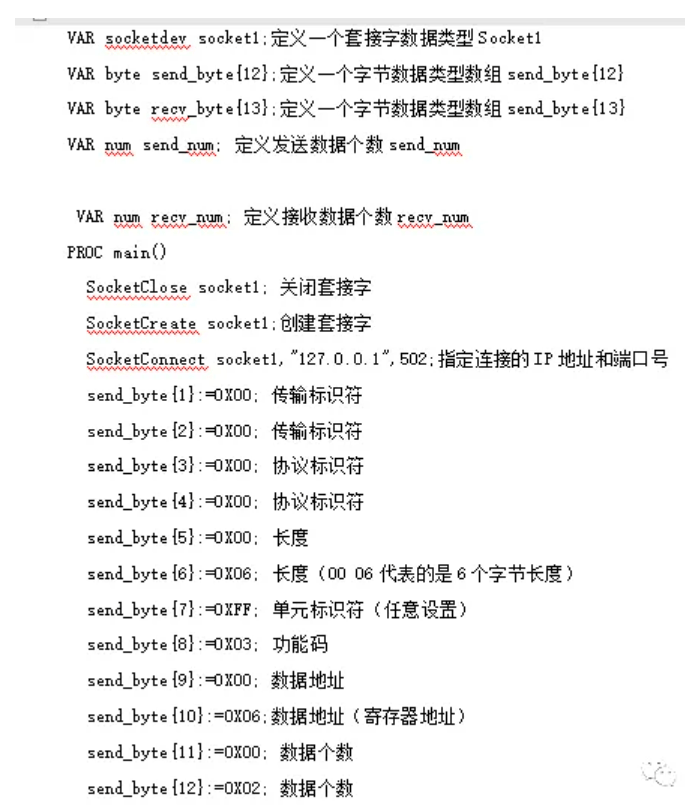
1. ABB机器人现在要读取调试工具中的保持寄存器的值,从第6字节开始读取2个字,使用的功能码为0X03。
2. 2.读取到了数据在机器人的示教器上显示
3.机器人作为客户端,Profinet转ModbusTCP网关为服务器
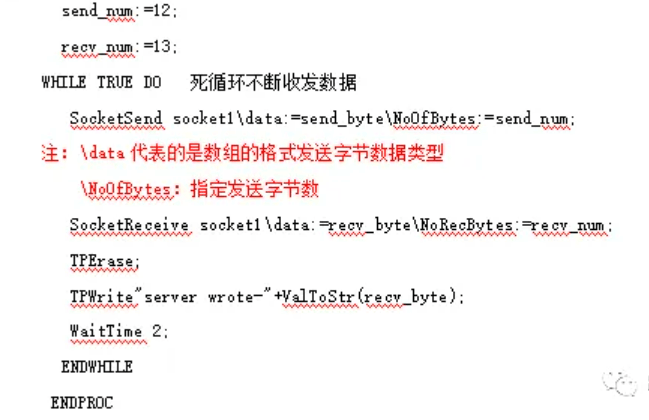
机器人端程序编写:
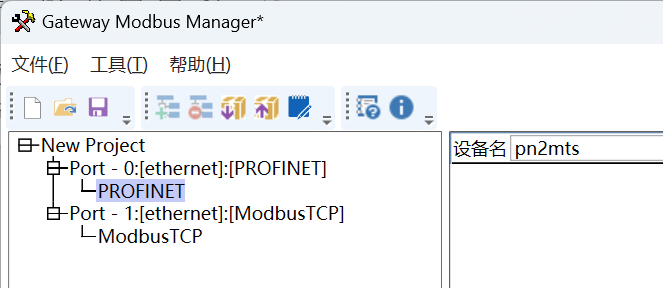
机器人配置完成后,打开网关配置软件“Gateway Configuration Studio”
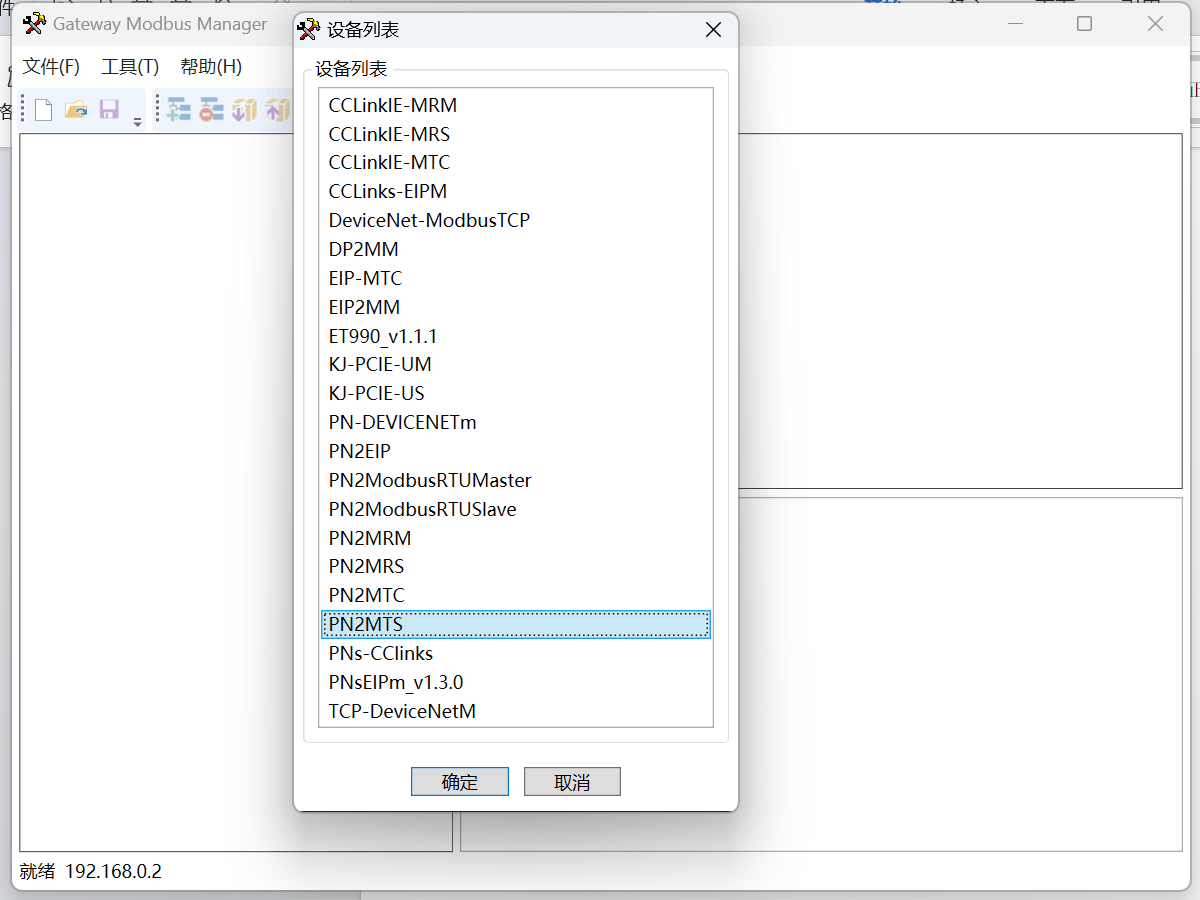
新建项目选择PN2MTS(网关作为ModbusTCP从站),并分配Profinet与ModbusTCP两侧的IP地址
首先分配网关在Profinet一侧的设备名称及IP地址(与ModbusTCP可不在同一网段)
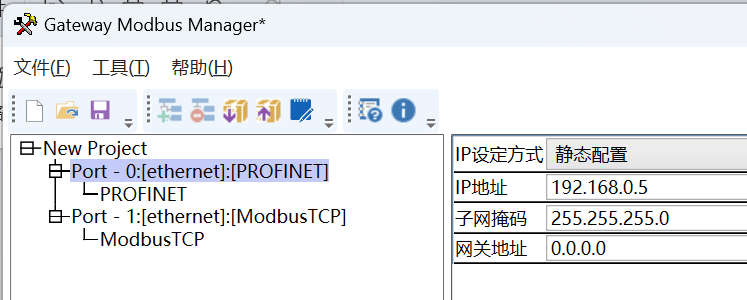
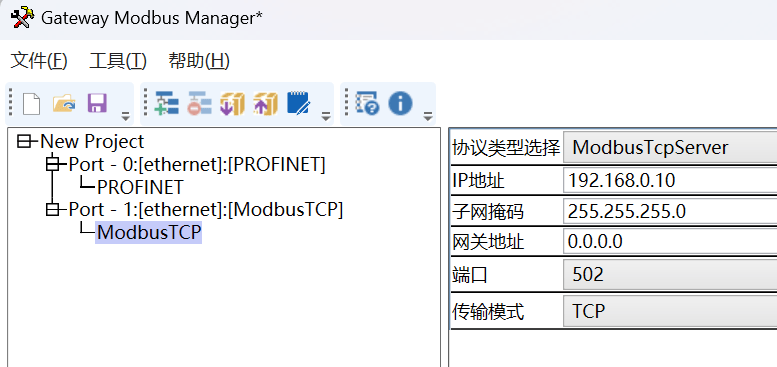
设置网关的ModbusTCP一侧的IP地址,并将ip地址写入abb机器人编程
配置完成后下载配置到网关。将网关GSD文件导入西门子PLC配置软件后,配置好同样的设备名称及IP以及分配好输入输出数据长度之后,观察网关指示灯,当PWR,SYS,OK灯常亮,TXD及RXD交替闪烁,说明网关已经正常通讯,ABB机器人开始读写网关从西门子PLC收到的数据。






