K230的摄像头架构
在立创·庐山派-K230-CanMV开发板中,Sensor模块的主要作用是负责获取图像数据。这个模块将光信号转化为数字信号,供后续图像处理算法使用。
K230的Sensor模块API提供了对这些硬件的底层控制,模块负责图像采集与数据处理。该模块提供了一套高级 API,开发者可以利用这些接口轻松获取不同格式与尺寸的图像,而无需了解底层硬件的具体实现。其架构如下图所示:
他的canera device 1(2,3)指的是摄像头接口,就是用来调用三个接口上的摄像头的,然后三个摄像头每个摄像头都可以有三种图像输出,也就是可以设置三种不同配置输出三种不同的图像:三种:
rgb888p_img = sensor.snapshot(chn=CAM_CHN_ID_0)
rgb888p_img = sensor.snapshot(chn=CAM_CHN_ID_1)
rgb888p_img = sensor.snapshot(chn=CAM_CHN_ID_2)
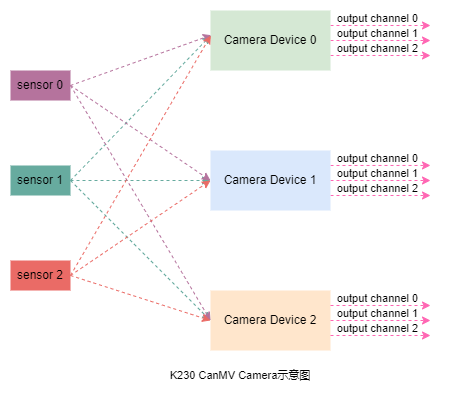
图中,sensor 0、sensor 1 和 sensor 2 分别代表三个图像输入传感器设备;这些传感器主要用于将环境中的光信号转化为数字图像信号。在实际系统中,这些传感器可以安装在不同的位置,用来捕获来自不同视角或者区域的图像数据。比如说三路摄像头场景,车辆前后摄像检测各一路+驾驶仓内一路。也可以将CSI0+CSI1转接成一个4lane的接口用来接更高清的摄像头。
Camera Device 0、Camera Device 1 和 Camera Device 2 是用于处理传感器输入数据的核心单元。每个 Camera Device 可以独立完成图像数据捕获,格式转换及预处理等。传感器和Camera Device之间是多对多的关系,也就是说多个传感器输入可以灵活映射到不同的Camera Device。
每个Camera Device支持 3个输出通道(output channel 0、output channel 1 和 output channel 2)。这些输出通道的主要功能是将处理后的图像数据并行传输到后续的算法模块或显示设备,同时也支持多种数据格式和尺寸。这样的架构设计,让K230能够支持多路图像数据的高效并行处理,非常适合实时性要求较高的AI视觉任务。
K230 的 sensor 模块最多支持三路图像传感器的同时接入,每一路均可独立完成图像数据的采集、捕获和处理。此外,每个视频通道可并行输出三路图像数据供后端模块进行进一步处理。实际应用中,具体支持的传感器数量、输入分辨率和输出通道数将受限于开发板的硬件配置和内存大小,因此需根据项目需求进行综合评估。
三路图像输入:
同时接入3个传感器,适合多摄像头应用场景,比如:
- 自动驾驶中的多视角检测。
- 安防监控中的多区域捕获。
- 工业检测中的多面检测。
三路图像输出:
为每个输入提供并行的多通道输出,便于在不同模块中并发处理,比如:
- 一路用于实时显示。
- 一路用于AI算法推理。
- 一路用于视频存储或回放。





