引言:上一节我们讲到了使用Alinx 7020b自带的sd卡中的petalinux进行epics的编译,但此种方案个性化程度不足。如:我们项目需要FPGA侧的配合,那么我们需要重新编译petalinx。
注意:本文的知识点来自下面两篇文章,我已经假设大家对petalinux有了一定的了解。
FPGA----ZCU106使用petalinux 2019.1(全网最详)-CSDN博客文章浏览阅读3.5k次,点赞18次,收藏31次。本文完成了Vivado 2019.1版本下的基于ZCU106的全部linux系统移植https://blog.csdn.net/qq_37912811/article/details/134519735FPGA----基于ZYNQ 7020实现EPICS通信系统-CSDN博客文章浏览阅读966次,点赞9次,收藏23次。本文详细介绍了如何在EPICS(ExperimentalPhysicsandIndustrialControlSystem)环境中创建一个IOC(Input/OutputController),编写aiRecord的驱动程序,包括dbd文件和C语言源代码,然后编译并启动IOC,最后通过通道访问查看运行结果,实现每秒生成0-999随机数的功能。
https://blog.csdn.net/qq_37912811/article/details/1471689801、本文软硬件:AX7Z020b、Vivado 2019.1、Ubuntu 18.04.1、make 3.81
这些配置在我先前的文章都可以找到下载地址。
2、在sdk中找到导出的.hdf文件
3、创建ax_peta工程
# 创建ax_peta工程
petalinux-create --type project --template zynq --name ax_peta
# 创建hardware文件夹,将xxx.hdf文件(在vivado中launch sdk生成的)存入
mkdir harware
# 进入工程
cd ax_peta
# 配置工程
petalinux-config --get-hw-description ../hardware
# 依据我之前的博客配置即可# 配置内核,默认配置保存并退出即可
petalinux-config -c kernel# 配置根文件系统,默认配置保存并退出即可
petalinux-config -c rootfs4、编译工程,并导出文件
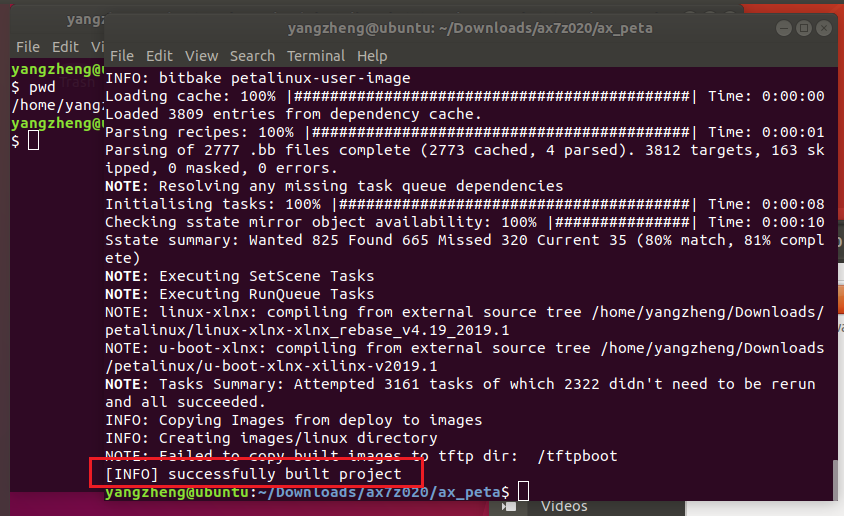
petalinux-build# 如果提示需要配置权限,那么就输入下述命令
sudo chmod -R 777 linux-xlnx-xlnx_rebase_v4.19_2019.1/sudo chmod -R 777 linux-xlnx-xlnx_rebase_v4.19_2019.1/scripts/出现下图就是编译好了
5、进入到images/linux生成image.ub文件
# 进入文件夹
cd images/linux# 生成imag.ub
petalinux-package --boot --u-boot --fpga --force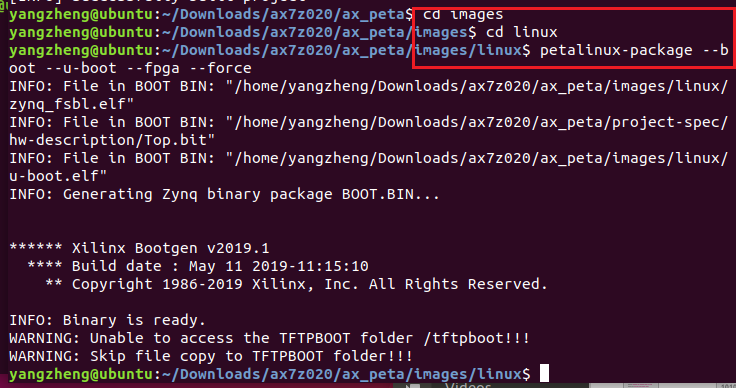
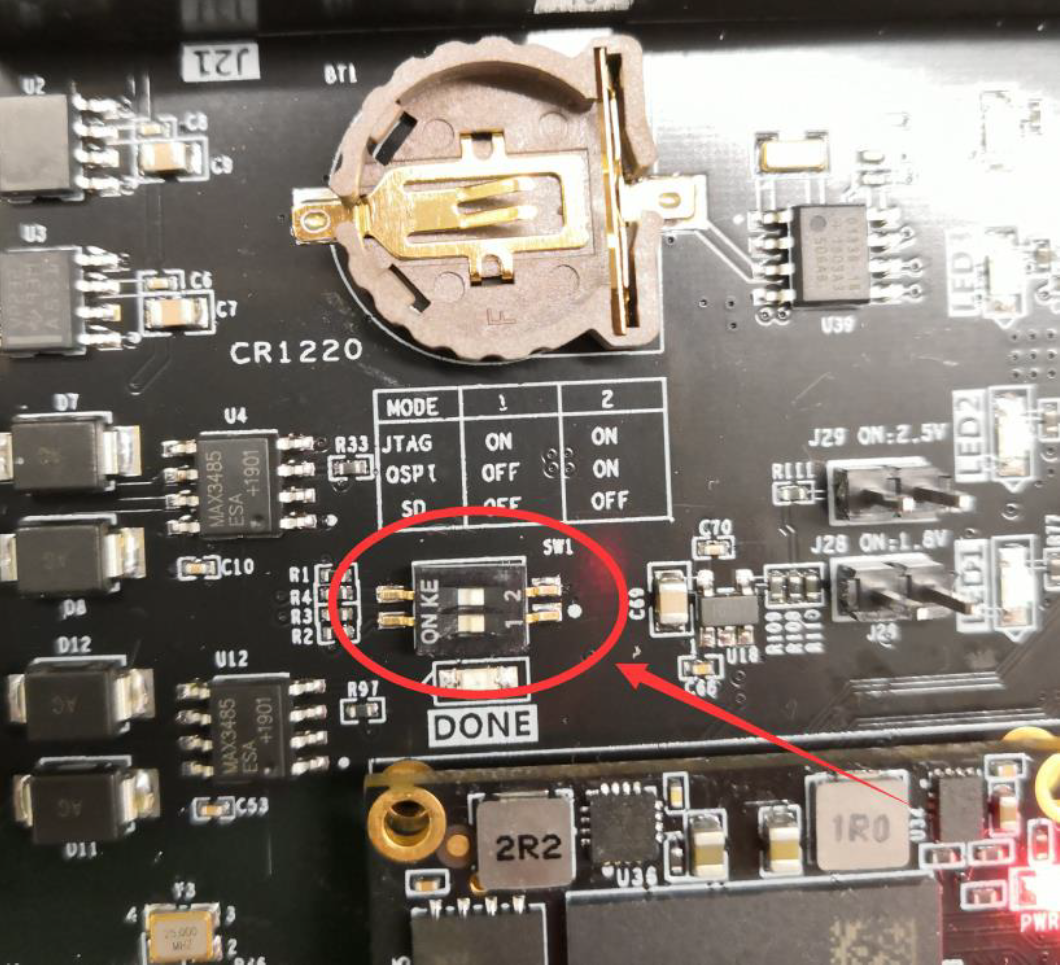
6、将7020设置为sd卡启动方式,正常买回来就是sd卡启动,挨着12就是sd卡启动了
3种启动方式MODE在图中白色表格有写。
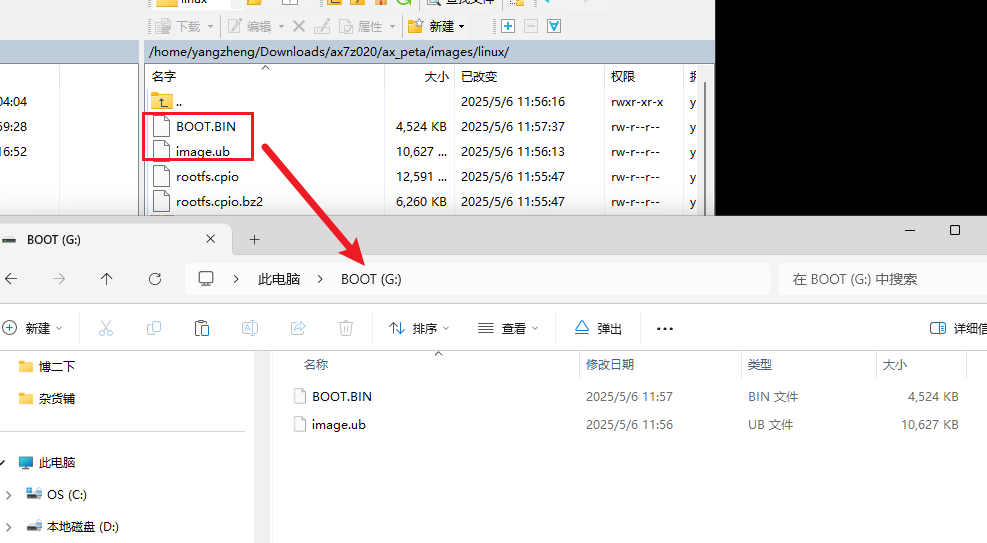
7、格式化SD卡,将BOOT.bin与image.ub移动到SD卡中,上电启动。
7、登录的用户名为:root,密码为:root
8、编写一个linux程序
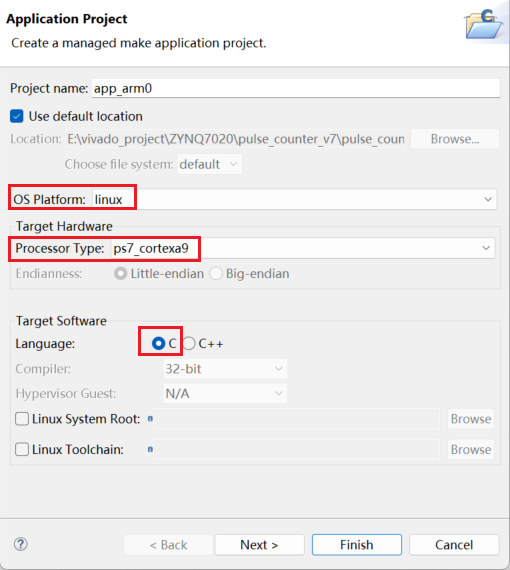
FPGA----ZCU106使用petalinux 2019.1的第一个app开发_petalinux app-CSDN博客文章浏览阅读746次。本文实现了xilinx sdk与petalinux的联合使用,在sdk仿真完毕后,可以将程序移植到petalinux中运行_petalinux apphttps://blog.csdn.net/qq_37912811/article/details/134581294(1)创建项目
平台选linux,处理器选A9,语言选C,因为咱们没有装C++的标准库。
(2)通过命令配置zynq的ip
# 查询网络接口
ls /sys/class/net# 保证172.24.14.68与上位机是同一网段,上位机ping即可
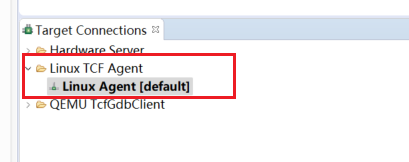
ifconfig eth0 172.24.14.68 netmask 255.255.255.0 up右下角设置Linux代理
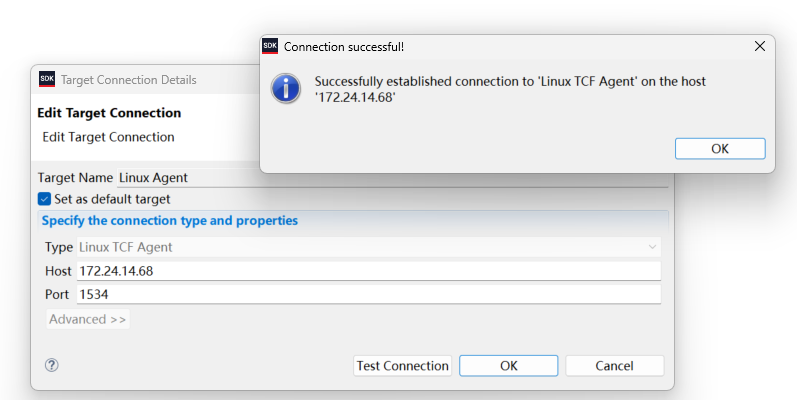
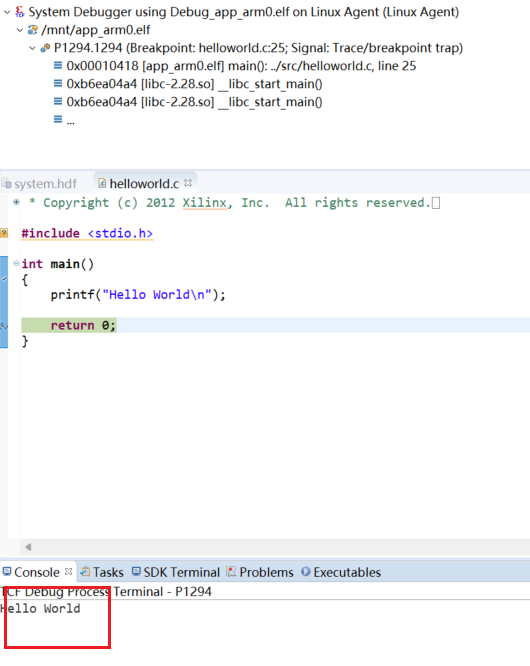
(3)启动程序
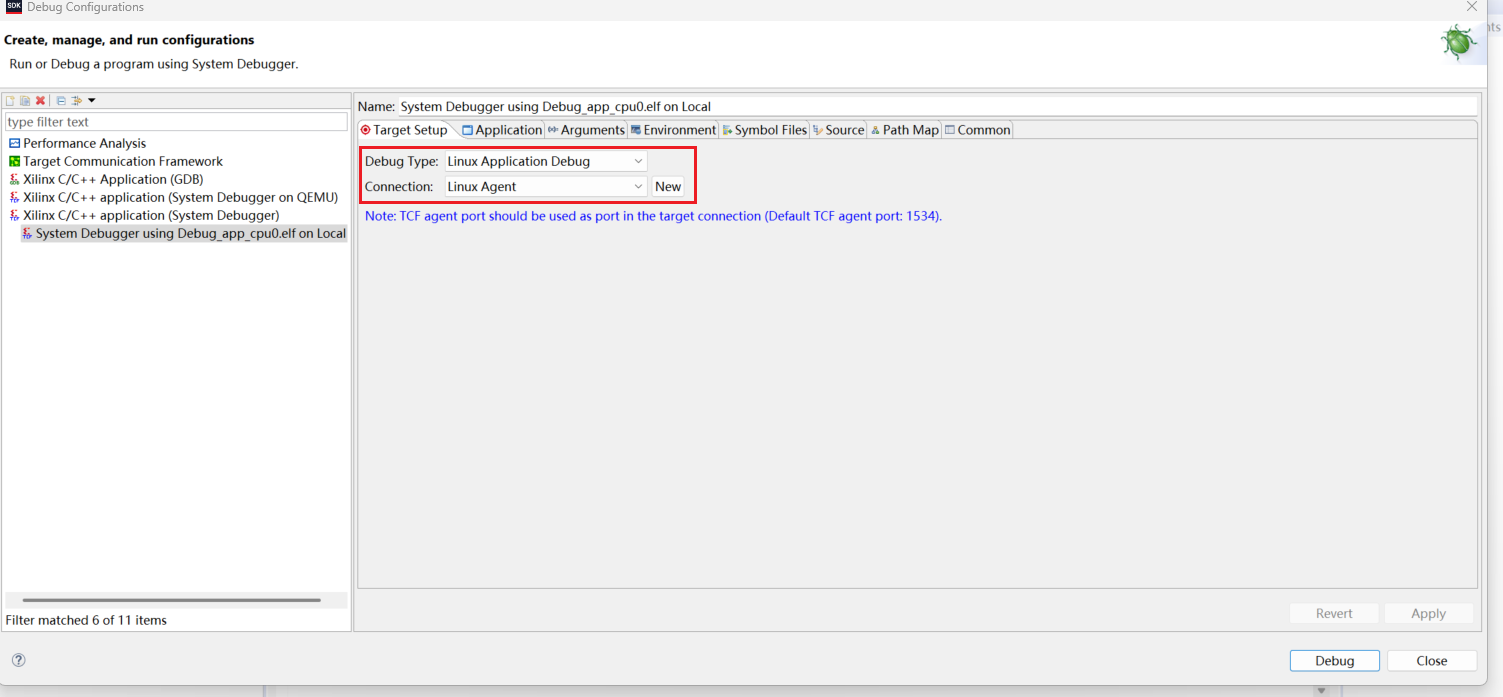
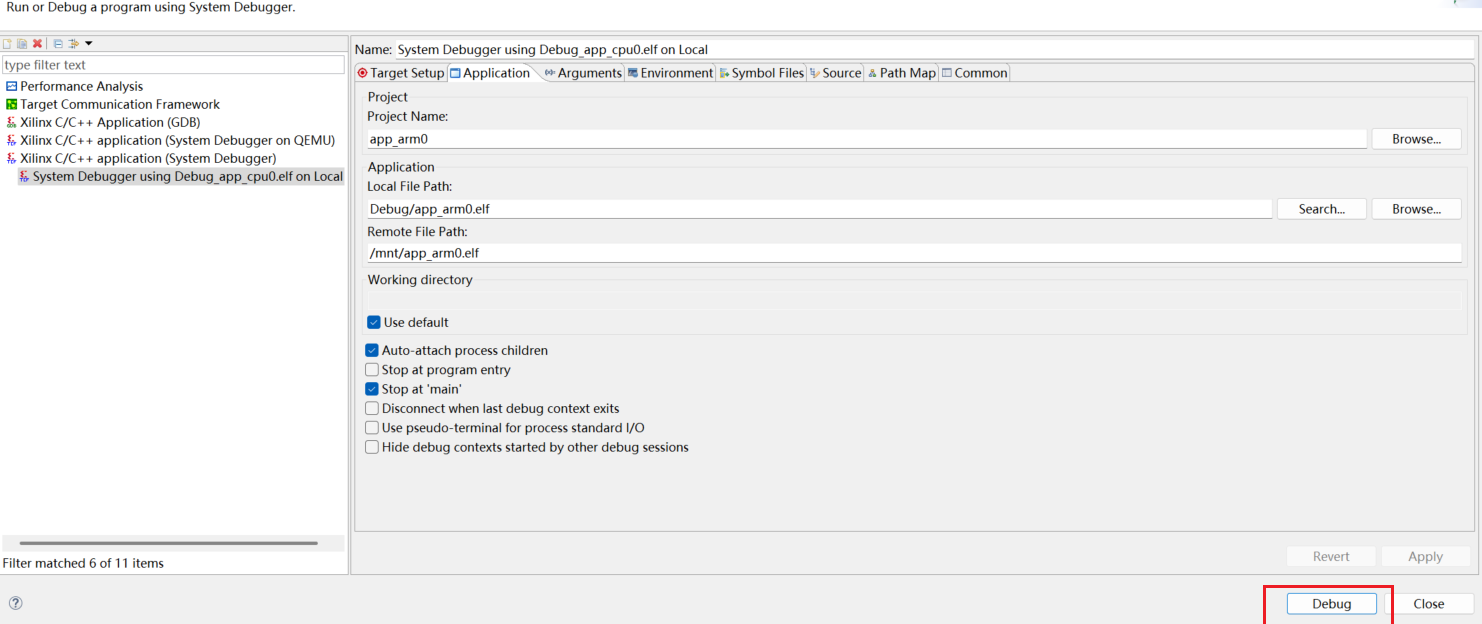
出现下面结果就是运行成功了