视频讲解:
复刻低成本机械臂 SO-ARM100 舵机配置篇(WSL)
飞特舵机
组装之前需要配置舵机的ID,如下的网址为舵机的资料,实际上用不到,但可以mark在这里
Software-深圳飞特模型有限公司
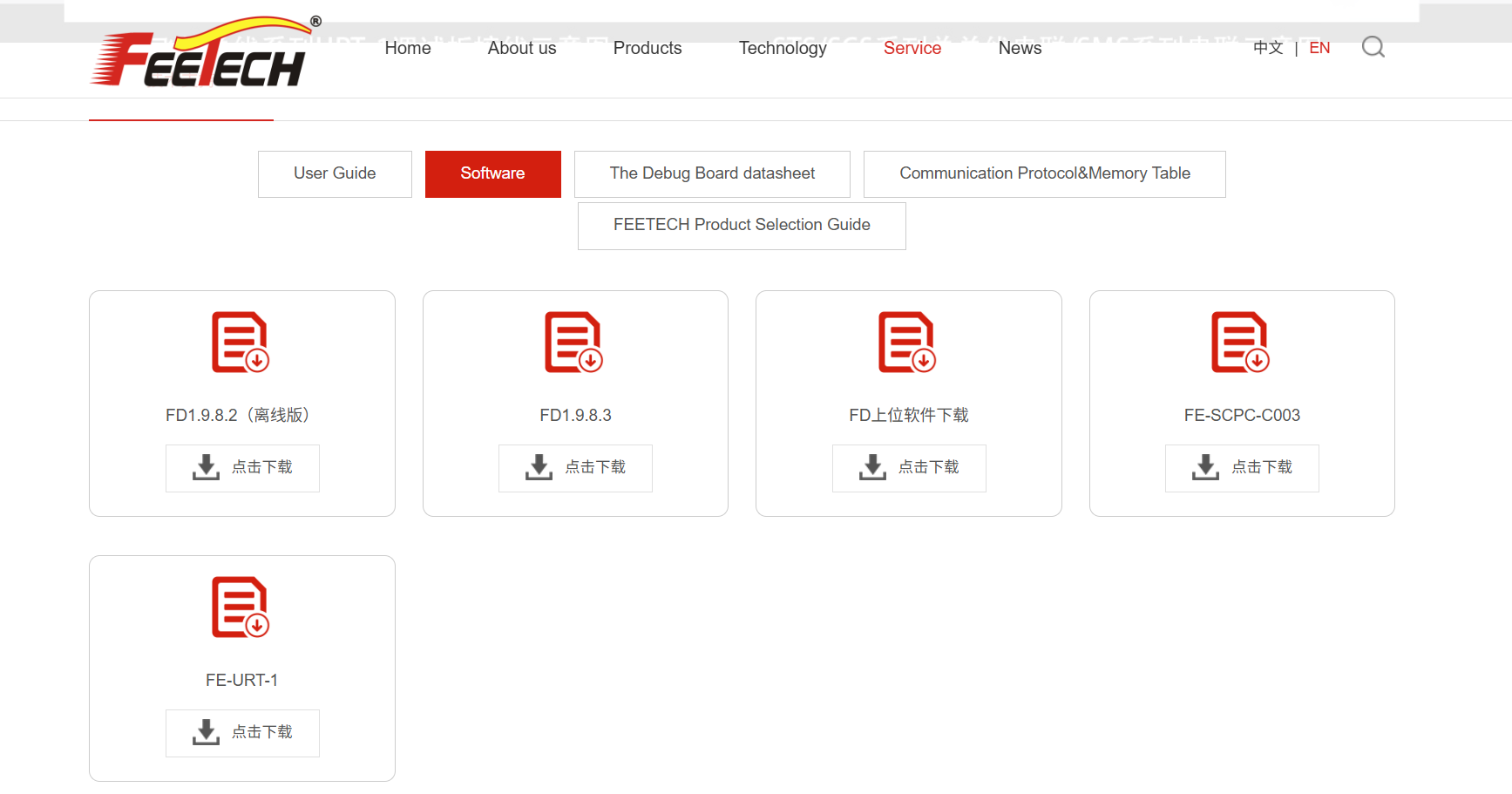
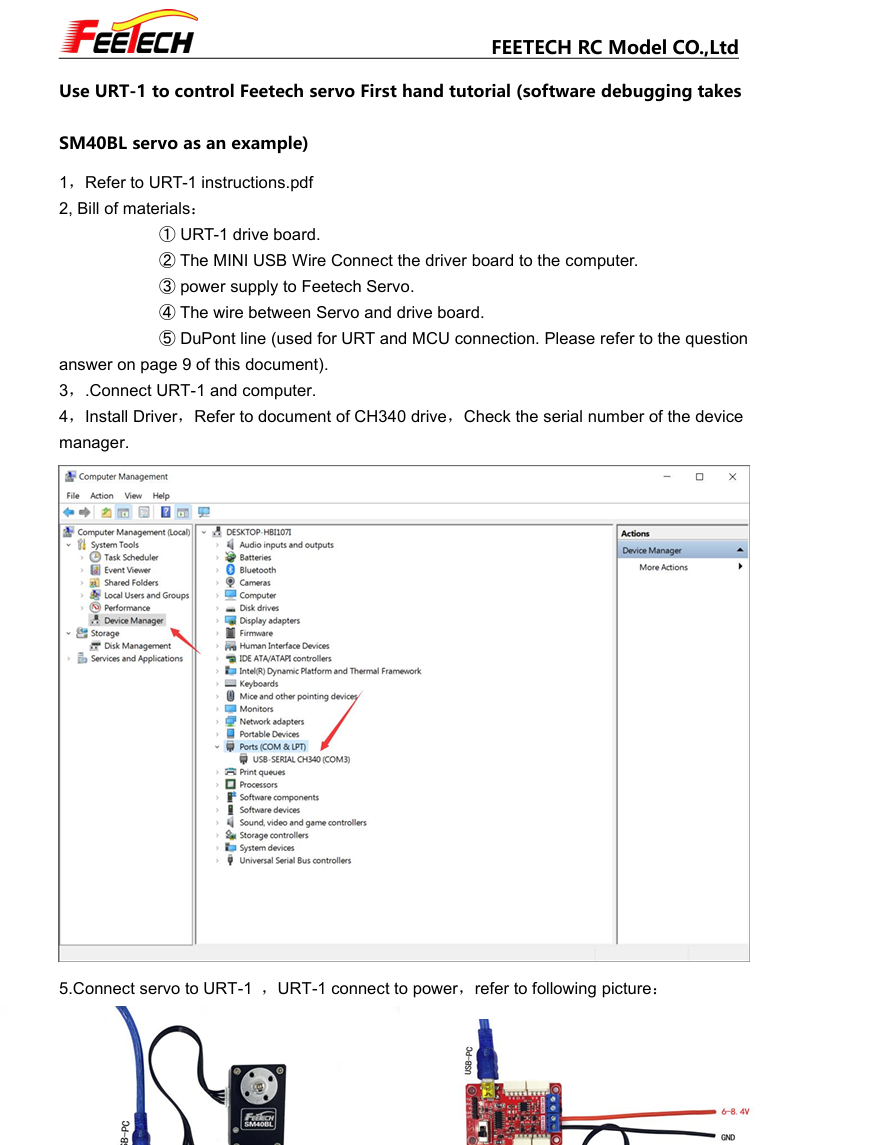
User Guide里面可以下载操作手册
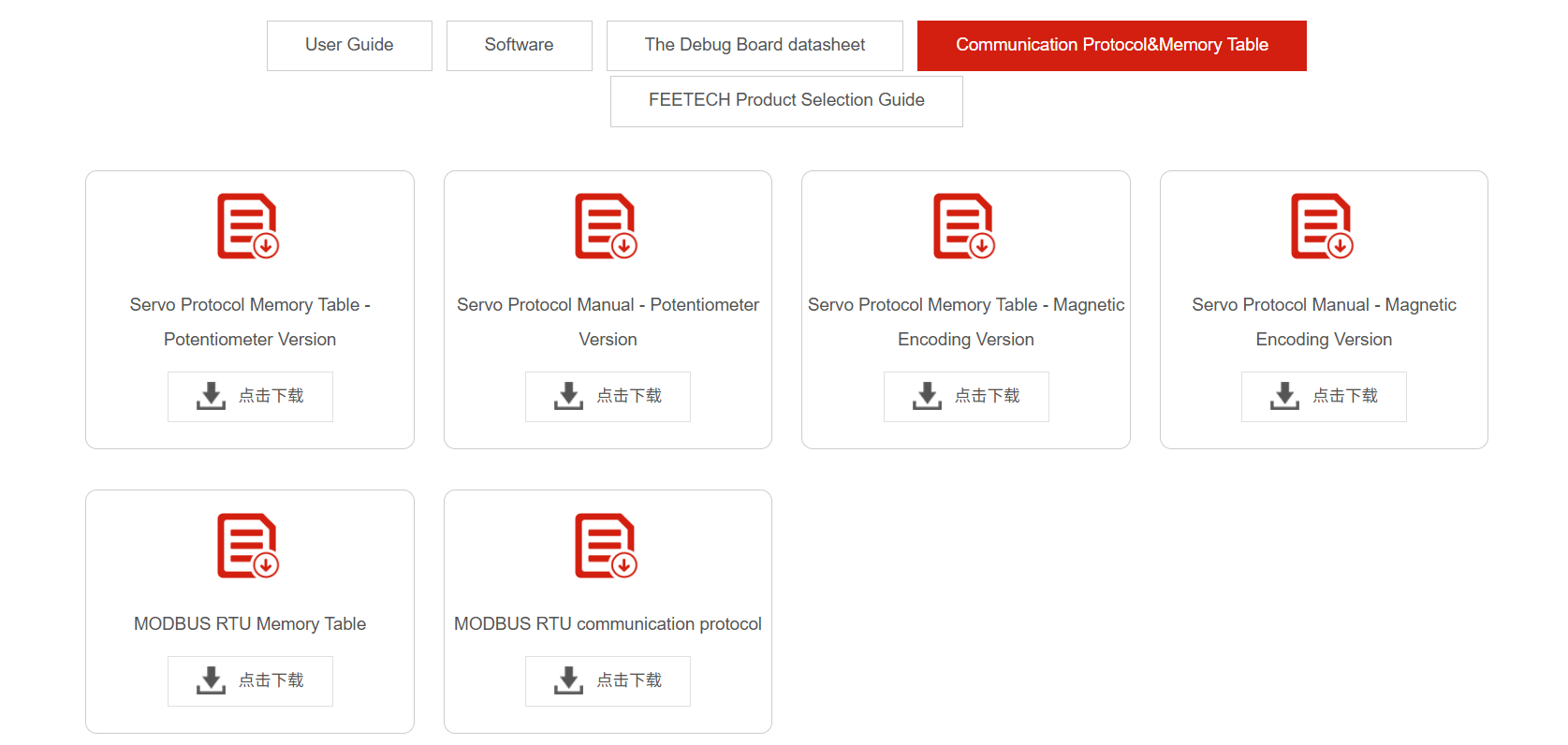
通信协议,嵌入式狂喜~
微雪舵机控制板
控制板资料如下,默认就是USB的方式,跳线帽在B位置
www.waveshare.net/wiki/Bus_Servo_Adapter_(A)_

配置
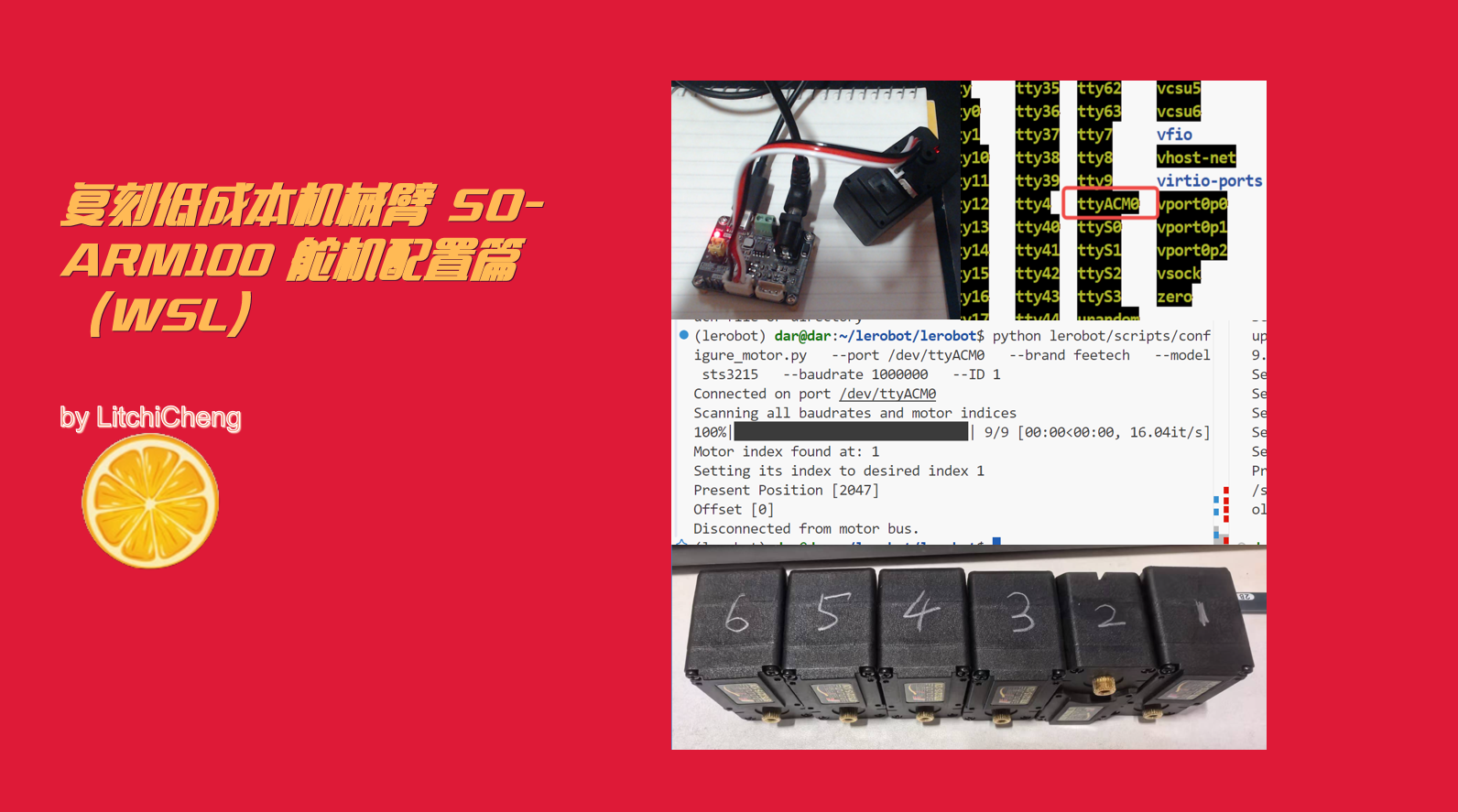
如下图,插上舵机线,注意通道的顺序,通上电源后
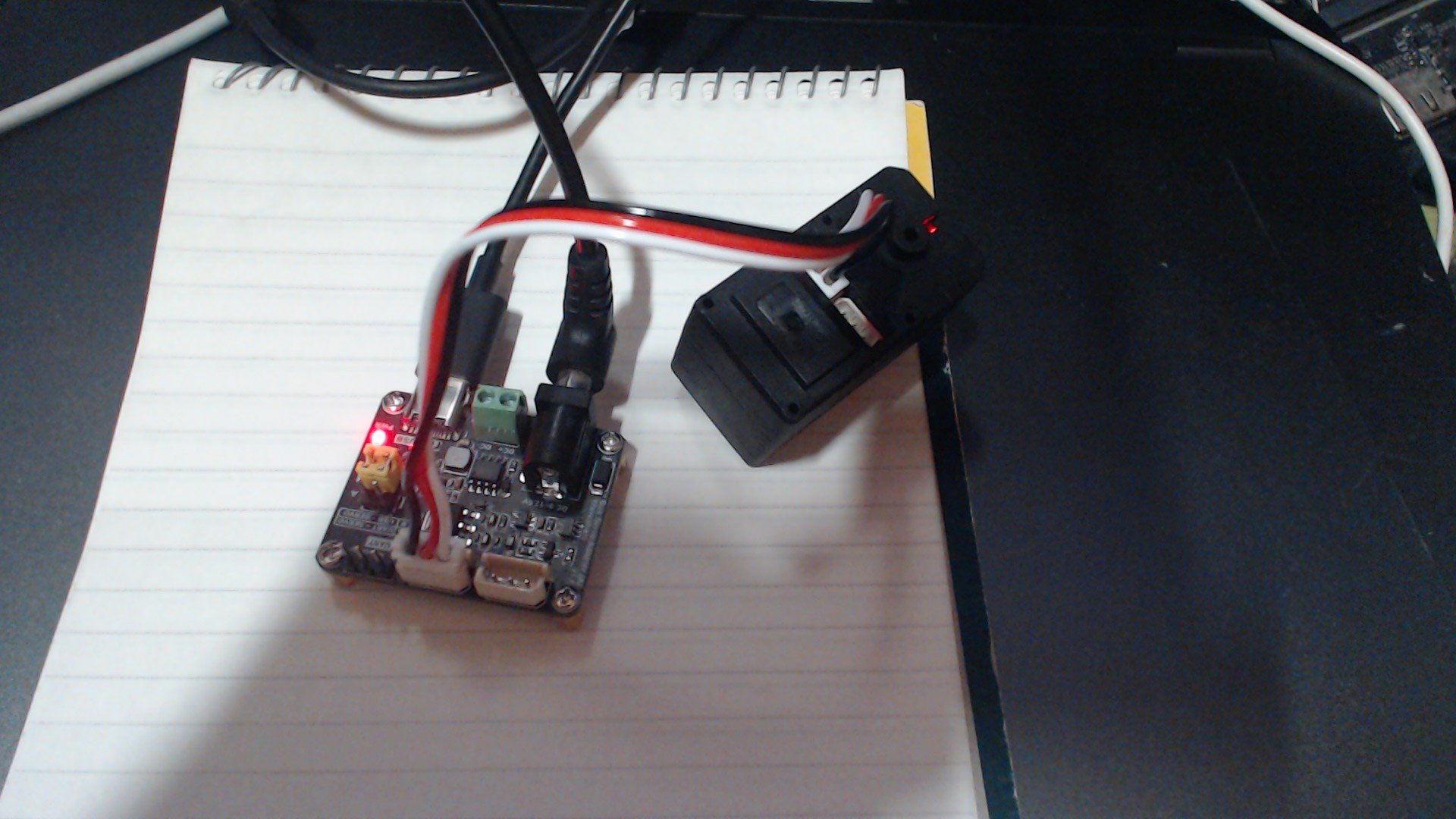
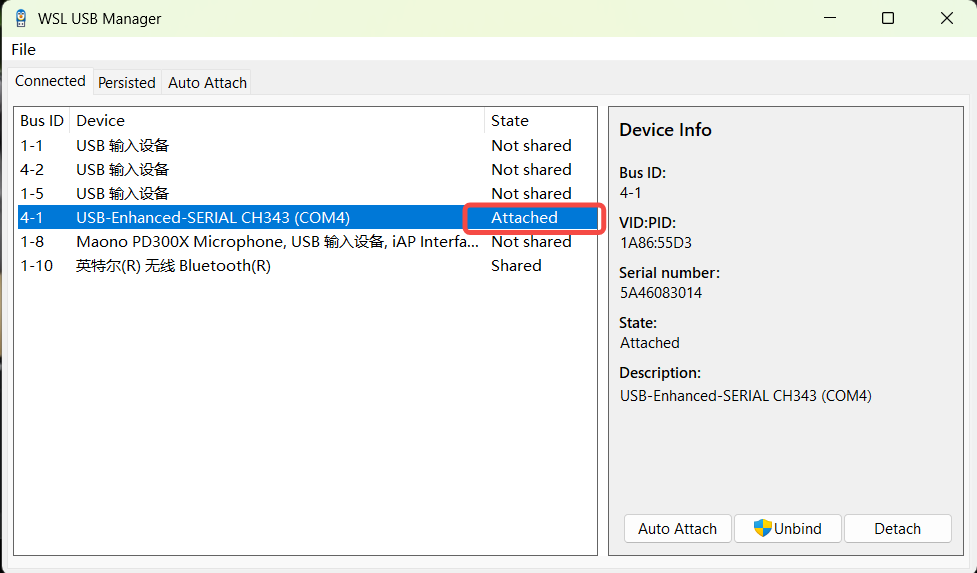
Windows下会有usb serial的设备,因为我用的WSL,所以需要把这个usb attach给WSL中
使用 ls /dev 看到出现了 ttyAMC0
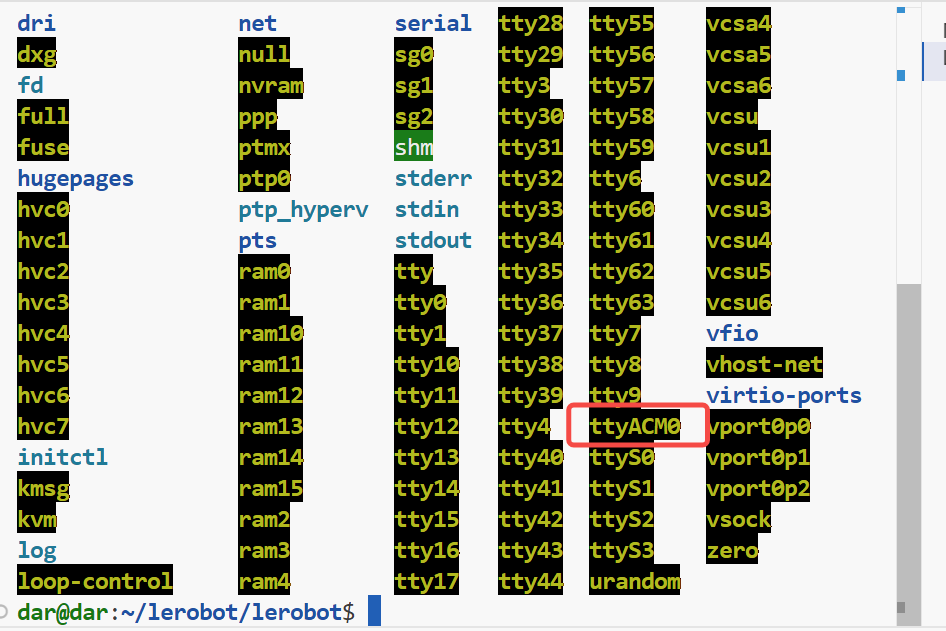
执行加权指令,为了给python运行时的访问,不然有权限问题
sudo chmod 666 /dev/ttyACM0参考 GitHub - huggingface/lerobot: 🤗 LeRobot: Making AI for Robotics more accessible with end-to-end learning 部署conda环境和clone仓库
git clone https://github.com/huggingface/lerobot.git
cd lerobot
conda create -y -n lerobot python=3.10
conda activate lerobot
conda install ffmpeg -c conda-forge
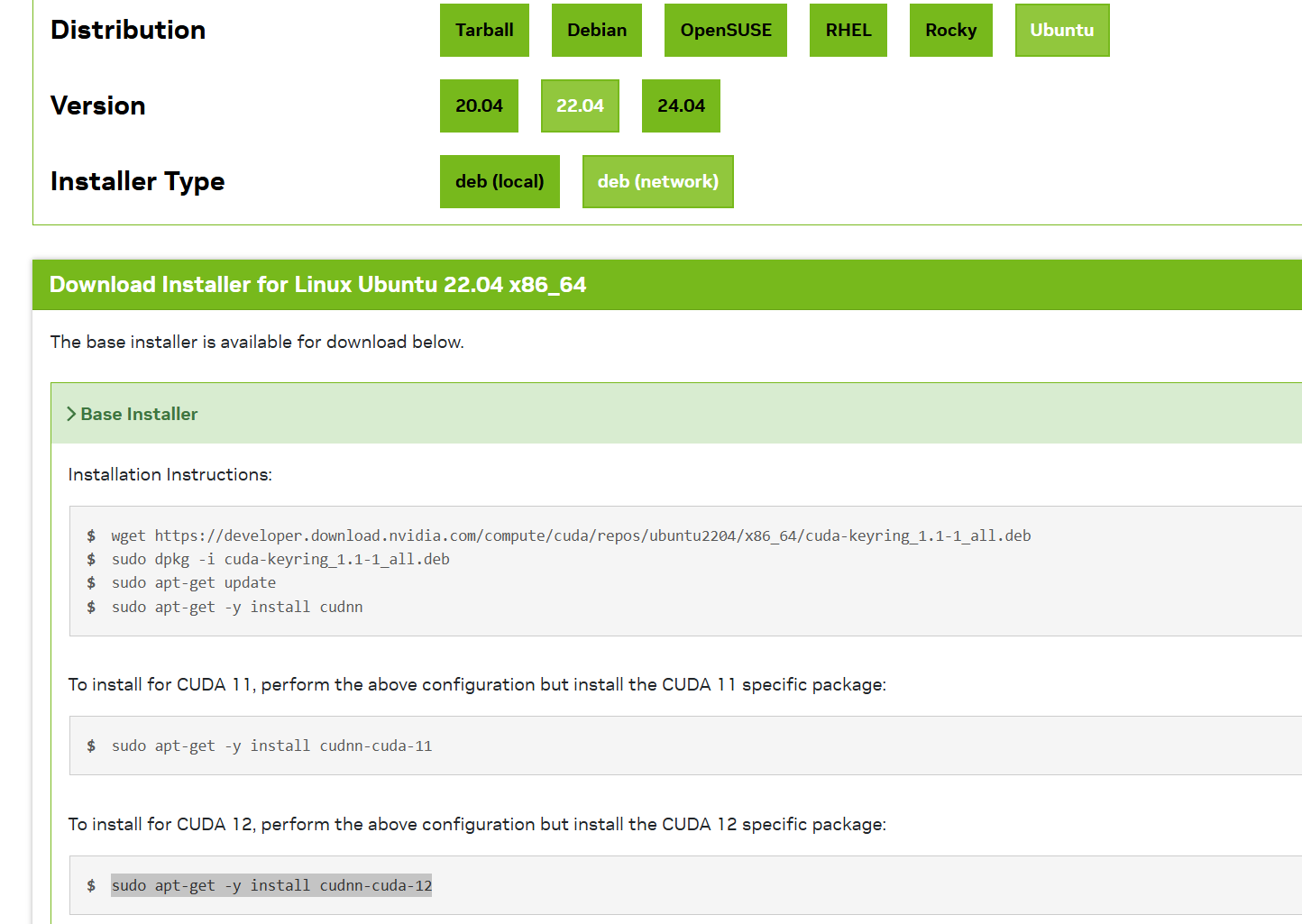
pip install -e .如果出现找不到cudnn.so.9,需要安装如下,对应你的环境
cuDNN 9.8.0 Downloads | NVIDIA Developer
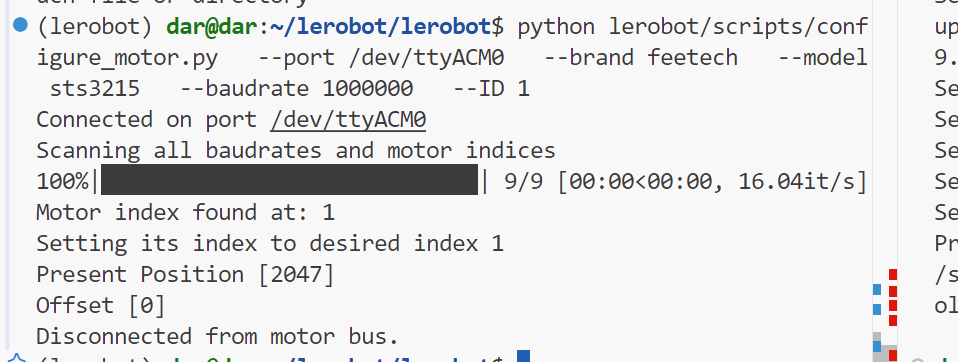
执行烧录指令,ID从1开始
python lerobot/scripts/configure_motor.py \--port /dev/ttyACM0 \--brand feetech \--model sts3215 \--baudrate 1000000 \--ID 1配置第一个舵机
配置第二个舵机
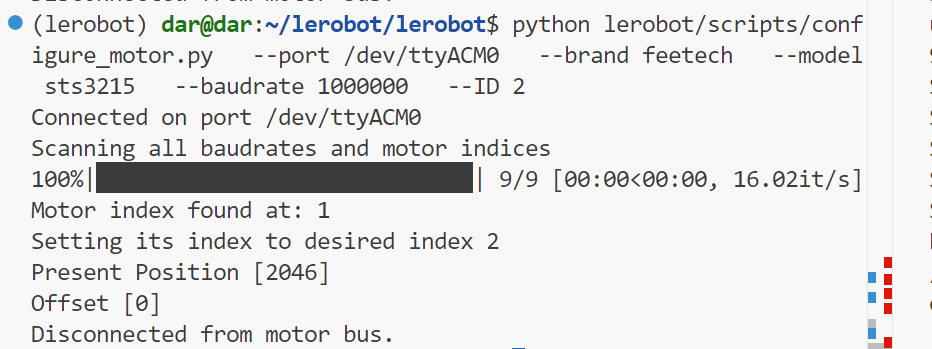
一个一个配置,总共6个舵机



)



