目录
- 效果一览
- 基本介绍
- 程序设计
- 参考文献
效果一览
基本介绍
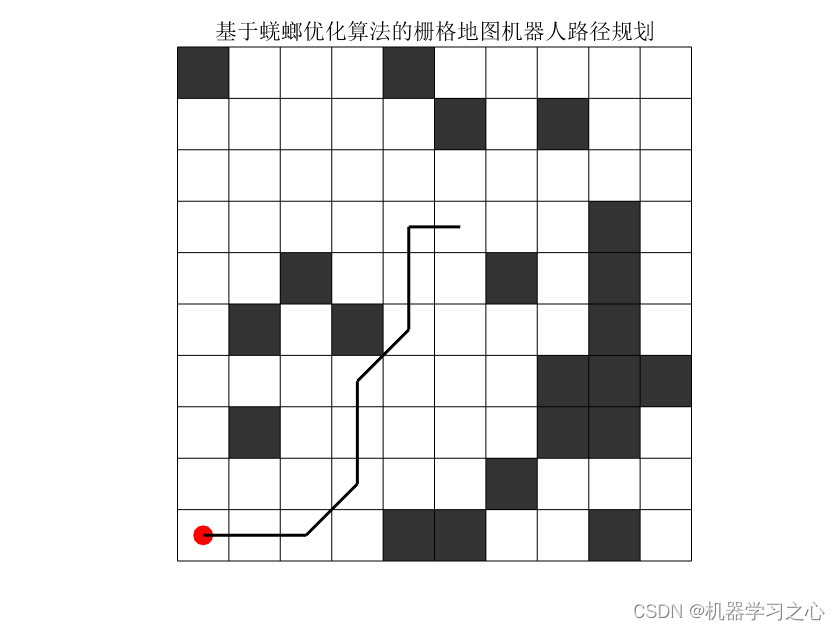
路径规划 | 基于蜣螂优化算法的栅格地图机器人路径规划(Matlab)
1.利用蜣螂算法DBO优化栅格地图机器人路径规划,效果如图所示,包括迭代曲线图、栅格地图等等~
2.注释清晰,适合新手小白[火]
3.附赠示例地形数据,直接运行runme即可一键出图.
程序设计
- 完整源码和数据私信博主回复基于蜣螂优化算法的栅格地图机器人路径规划(Matlab)
clc
clear
close all%% 输入数据
G=[ 0 0 1 1 1 0 0 0 0 11 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 00 1 1 0 1 0 0 0 0 00 1 1 0 1 0 0 0 1 00 0 0 0 0 0 1 0 0 00 0 0 1 0 0 0 0 0 10 0 0 0 0 0 1 1 0 00 1 0 0 0 0 1 0 0 00 1 0 0 1 0 0 0 0 0];
% G=[ 0 1 1 1 0
% 1 0 0 0 0
% 0 0 0 0 1
% 0 0 0 0 1
% 0 1 1 0 1];G = zeros(10,10);
d = randperm(95,21)+1;
d=sort(d);
G(d) = 1;%% 栅格绘制
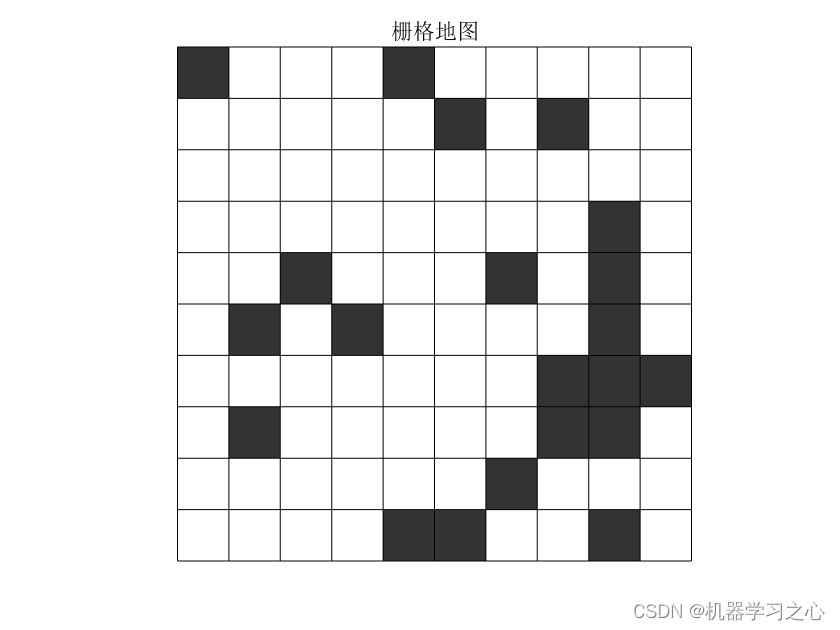
drawShanGe(G,0)
title('栅格地图')
%%
S = [1 1]; % 起点
E = [10 10]; % 终点
G0 = G;
G = G0(S(1):E(1),S(2):E(2)); % 该方式是为了方便更改起点与终点
[Xmax,dim] = size(G); % 栅格地图列数为粒子维数,行数为粒子的变化范围
dim = dim - 2; % 减2是去掉起点与终点%% 参数设置
maxgen = 50; % 最大迭代次数
NP = 30; % 种群数量%%%%%%%%%%%%%%%%%%%%%%%%%%%rPercent = 0.2; %%%%%%%%%%%%%%%%%%%%%%%%%%%
pNum = round( NP * rPercent ); % %发现者Xmin = 1; % 变量下界%% 初始化
X = zeros(NP,dim);
for i = 1:NPfor j = 1:dimcol = G(:,j+1); % 地图的一列id = find(col == 0); % 该列自由栅格的位置X(i,j) = id(randi(length(id))); % 随机选择一个自由栅格id = [];end fit( i ) = fitness(X( i, : ),G);
end
fpbest = fit; % 个体最优适应度
pX = X; % 个体最优位置XX=pX;
[fgbest, bestIndex] = min( fit ); % 全局最优适应度
bestX = X(bestIndex, : ); % 全局最优位置
[fmax,B]=max(fit);
worse= X(B,:);
%%
for gen = 1 : maxgengen[ ans, sortIndex ] = sort( fit );% Sort.[fmax,B]=max( fit );worse= X(B,:); [~, Idx] = sort( fpbest );r2=rand(1);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
for i = 1 : pNumif(r2<0.9)r1=rand(1);a=rand(1,1);if (a>0.1)a=1;elsea=-1;endX( i , : ) = pX( i , :)+0.3*abs(pX(i , : )-worse)+a*0.1*(XX( i , :)); % Equation (1)elseaaa= randperm(180,1);if ( aaa==0 ||aaa==90 ||aaa==180 )X( i , : ) = pX( i , :); endtheta= aaa*pi/180; X( i , : ) = pX( i , :)+tan(theta).*abs(pX(i , : )-XX( i , :)); % Equation (2) endX( i , :) = Bounds(X(i , : ), Xmin, Xmax );fit( i ) = fitness( X( i , : ),G );end [ fMMin, bestII ] = min( fit ); bestXX = X( bestII, : );
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%R=1-gen/maxgen; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%Xnew1 = bestXX.*(1-R); Xnew2 =bestXX.*(1+R); %%% Equation (3)Xnew1= Bounds(Xnew1, Xmin, Xmax );Xnew2 = Bounds(Xnew2, Xmin, Xmax );%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%Xnew11 = bestX.*(1-R); Xnew22 =bestX.*(1+R); %%% Equation (5)Xnew11= Bounds(Xnew11, Xmin, Xmax );Xnew22 = Bounds(Xnew22, Xmin, Xmax );for i = ( pNum + 1 ) :12 % Equation (4)X( i, : )=bestXX+((rand(1,dim)).*(pX( i , : )-Xnew1)+(rand(1,dim)).*(pX( i , : )-Xnew2));X( i , :) = Bounds(X(i , : ), min(Xnew1), max(Xnew2) );fit( i ) = fitness( X( i , : ),G );endfor i = 13: 19 % Equation (6)X( i, : )=pX( i , : )+((randn(1)).*(pX( i , : )-Xnew11)+((rand(1,dim)).*(pX( i , : )-Xnew22)));X( i , :) = Bounds(X(i , : ), Xmin, Xmax );fit( i ) = fitness( X( i , : ),G );endfor j = 20 : NP % Equation (7)X( j,: )=bestX+randn(1,dim).*((abs(( pX(j,: )-bestXX)))+(abs(( pX(j,: )-bestX))))./2;X( j , :) = Bounds(X(j , : ), Xmin, Xmax );fit( j ) = fitness( X( j , : ),G );end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% XX=pX;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 更新个体最优值和全局最优值for i = 1 : NPif (fit(i) < fpbest(i))fpbest(i) = fit(i);pX(i, :) = X(i, :);endif(fpbest(i) < fgbest)fgbest = fpbest(i);bestX = pX(i, :);endendbestX = LocalSearch(bestX,Xmax,G);fgbest = fitness(bestX,G);FG(gen,1)=fgbest;
end
参考文献
[1] 基于人工势场结合快速搜索树APF+RRT实现机器人避障规划附matlab代码
[2] 基于蚁群算法求解栅格地图路径规划问题matlab源码含GUI






