CoACD 基于碰撞感知凹性与树搜索的近似凸分解
- CoACD 官方文档
CoACD(Convex Approximation of Complex Decompositions)是一种用于将复杂网格分解为多个凸包的算法, 专为 3D 网格设计了近似凸分解算法,强调在保持物体间潜在碰撞条件的同时减少组件数量,优化了后续应用中的精细且高效的对象交互。该算法在计算机图形学、物理模拟和碰撞检测等领域有广泛应用。
本文档将详细介绍如何使用 Open3D 可视化 CoACD 凸包分解前后的网格。
1. 安装依赖
首先,确保你已经安装了必要的依赖库:
pip install trimesh open3d coacd
2. 加载和处理网格
我们将使用 trimesh 加载一个网格文件,并使用 coacd 进行凸包分解。
import coacd
import trimesh
import open3d as o3d
import numpy as np# 加载输入的网格文件
input_file = 'doll.obj'
mesh = trimesh.load(input_file, force="mesh")# 将加载的网格转换为 coacd 的 Mesh 对象
mesh_coacd = coacd.Mesh(mesh.vertices, mesh.faces)# 运行 CoACD 算法,返回凸包列表
parts = coacd.run_coacd(mesh_coacd)
3. 使用 Open3D 可视化原始网格
我们将使用 Open3D 可视化原始的网格。
# 使用 open3d 可视化原始网格
original_mesh = o3d.geometry.TriangleMesh(vertices=o3d.utility.Vector3dVector(mesh.vertices),triangles=o3d.utility.Vector3iVector(mesh.faces)
)
original_mesh.paint_uniform_color([0.5, 0.5, 0.5])
o3d.visualization.draw_geometries([original_mesh], window_name="Original Mesh")
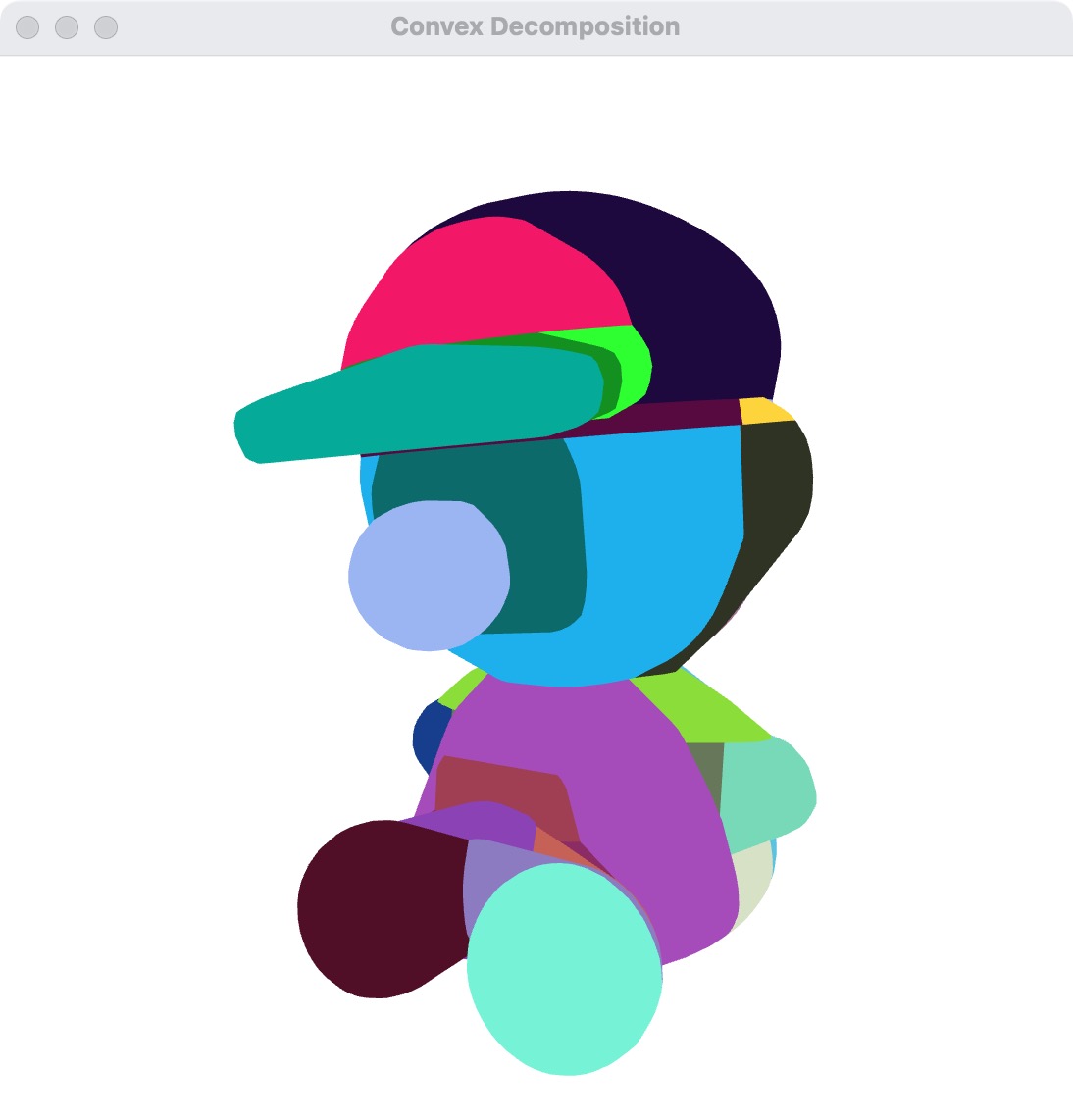
4. 使用 Open3D 可视化凸包分解后的网格
接下来,我们将使用 Open3D 可视化凸包分解后的网格。
# 使用 open3d 可视化凸包分解后的网格
convex_meshes = []
for part in parts:vertices = part[0]faces = part[1]convex_mesh = o3d.geometry.TriangleMesh(vertices=o3d.utility.Vector3dVector(vertices),triangles=o3d.utility.Vector3iVector(faces))convex_mesh.paint_uniform_color(np.random.random(3))convex_meshes.append(convex_mesh)o3d.visualization.draw_geometries(convex_meshes, window_name="Convex Decomposition")
5. 整体示例
import coacd
import trimesh
import open3d as o3d
import numpy as np# 加载输入的网格文件
input_file = 'doll.obj'
mesh = trimesh.load(input_file, force="mesh")# 将加载的网格转换为 coacd 的 Mesh 对象
mesh_coacd = coacd.Mesh(mesh.vertices, mesh.faces)# 运行 CoACD 算法,返回凸包列表
parts = coacd.run_coacd(mesh_coacd)# 使用 open3d 可视化原始网格
original_mesh = o3d.geometry.TriangleMesh(vertices=o3d.utility.Vector3dVector(mesh.vertices),triangles=o3d.utility.Vector3iVector(mesh.faces)
)
original_mesh.paint_uniform_color([0.5, 0.5, 0.5])
o3d.visualization.draw_geometries([original_mesh], window_name="Original Mesh")# 使用 open3d 可视化凸包分解后的网格
convex_meshes = []
for part in parts:vertices = part[0]faces = part[1]convex_mesh = o3d.geometry.TriangleMesh(vertices=o3d.utility.Vector3dVector(vertices),triangles=o3d.utility.Vector3iVector(faces))convex_mesh.paint_uniform_color(np.random.random(3))convex_meshes.append(convex_mesh)o3d.visualization.draw_geometries(convex_meshes, window_name="Convex Decomposition")
5. CoACD 与 V-HACD 的区别
CoACD(Convex Approximation of Complex Decompositions)和 V-HACD(Volumetric Hierarchical Approximate Convex Decomposition)都是用于将复杂网格分解为多个凸包的算法。尽管它们的目标相似,但在实现细节和应用场景上存在一些区别。
5.1 算法原理对比
-
CoACD:
- 初始分解:通过初步分解生成初始的凸包集合。
- 迭代优化:通过迭代优化过程,逐步改进凸包的质量,使其更好地逼近原始网格。
- 合并与细化:在优化过程中,可能会对凸包进行合并或细化,以提高分解的质量。
-
V-HACD:
- 体积分解:基于体积的层次化分解方法,将网格分解为多个体积块。
- 层次化聚类:通过层次化聚类算法,将体积块聚合成凸包。
- 细化与优化:对生成的凸包进行细化和优化,以提高分解的质量。
5.2 适用场景
-
CoACD:
- 更适合需要高精度凸包分解的场景。
- 在需要迭代优化和细化的应用中表现更好。
- 适用于需要动态调整凸包数量和精度的场景。
-
V-HACD:
- 更适合需要快速生成凸包分解的场景。
- 在处理大规模网格时表现更好。
- 适用于需要层次化分解和聚类的应用。
5.3 性能对比
-
CoACD:
- 由于迭代优化过程,计算时间可能较长。
- 生成的凸包质量较高,适合高精度需求。
-
V-HACD:
- 计算速度较快,适合实时应用。
- 生成的凸包数量较多,适合大规模网格。
5.4 使用方法
-
CoACD:
import coacd import trimesh# 加载网格 mesh = trimesh.load('doll.obj', force="mesh") mesh_coacd = coacd.Mesh(mesh.vertices, mesh.faces)# 运行 CoACD parts = coacd.run_coacd(mesh_coacd) -
V-HACD:
import pyvhacd import trimesh# 加载网格 mesh = trimesh.load('doll.obj', force="mesh")# 运行 V-HACD vhacd = pyvhacd.VHACD() vhacd.compute(mesh.vertices, mesh.faces) parts = vhacd.get_convex_hulls()
5.5 参数设置
-
CoACD:
max_convex_hull: 最大凸包数量。threshold: 精度阈值。max_iter: 最大迭代次数。
-
V-HACD:
resolution: 分辨率。concavity: 凸度。plane_downsampling: 平面降采样。convex_hull_downsampling: 凸包降采样。
5.6 总结
- CoACD 更适合需要高精度和迭代优化的应用。
- V-HACD 更适合需要快速分解和处理大规模网格的应用。
根据具体需求选择合适的算法,可以更好地满足应用场景的要求。


![[C++] STL数据结构小结](http://pic.xiahunao.cn/nshx/[C++] STL数据结构小结)



