1. 配置ROS环境
1.1 安装Ubuntu 20
虚拟机及系统的共享盘地址:【https://pan.baidu.com/s/1DxUpom3lj0xkr5_CwqdEVA?pwd=h7ta】
1.2 创建虚拟环境
# 安装Miniconda
./Miniconda3-latest-Linux-x86_64.sh
# 创建虚拟环境
conda create -y -n autoNav
# 激活虚拟环境
conda activate autoNav
# 禁用自动激活base虚拟环境(防止每次执行.bashrc切换到base)
conda config --set auto_activate_base false
1.3 安装ROS环境
# 安装ROS noetic(https://wiki.ros.org/noetic/Installation/Ubuntu)
#设置sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
# 设置密钥
sudo apt install curl
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
# 更新 Debian 包索引
sudo apt update & sudo apt upgrade -y
# 桌面完整版 : 包含 ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航以及 2D/3D 感知包
sudo apt install ros-noetic-desktop-full
# 设置环境
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
# 初始化 rosdep(ros依赖项管理工具)
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
sudo rosdep init
rosdep update
# 启动ros中心,验证安装
roscore
2. 配置Gazebo环境
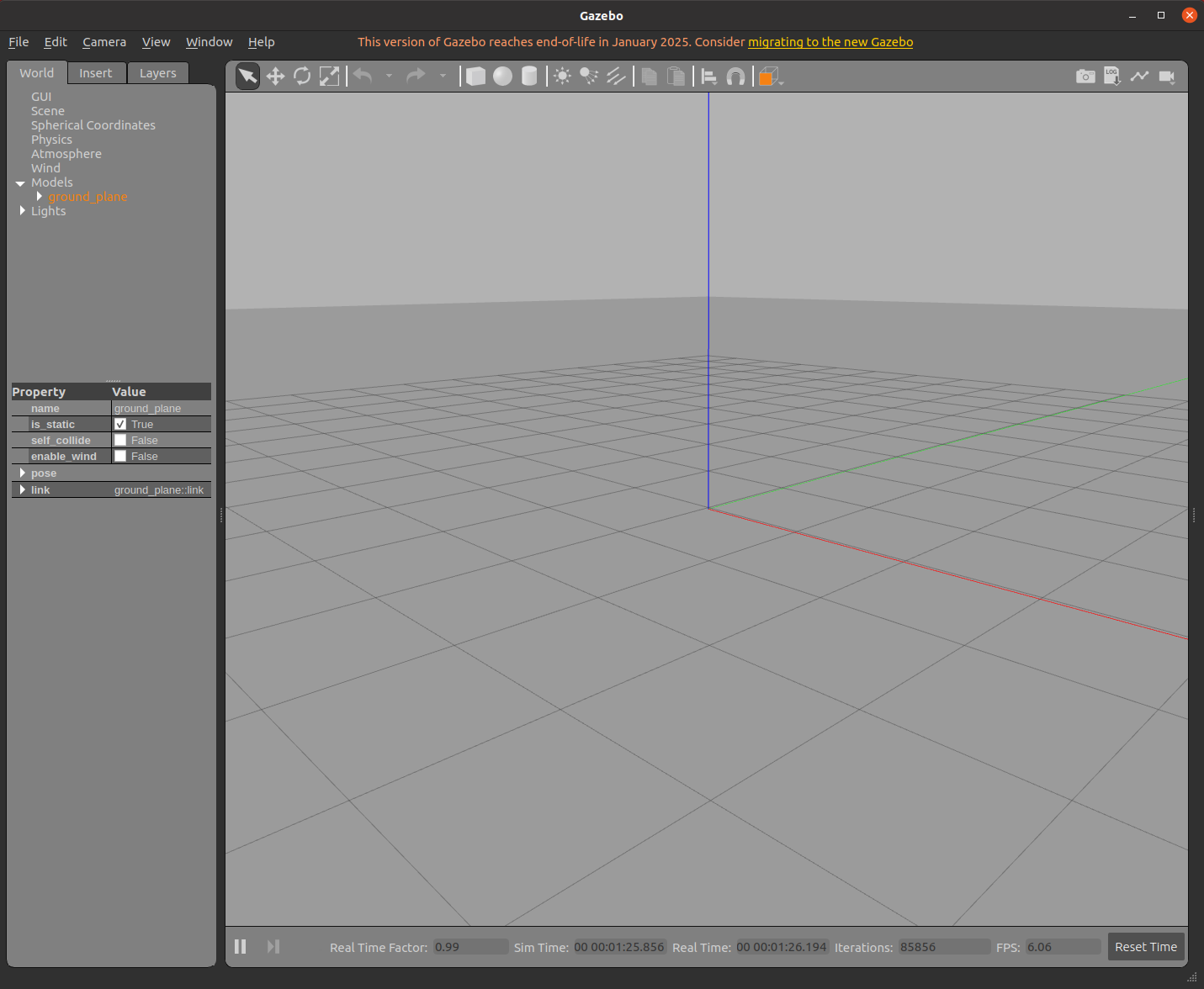
2.1 启动空环境
roslaunch gazebo_ros empty_world.launch
或者
gazebo
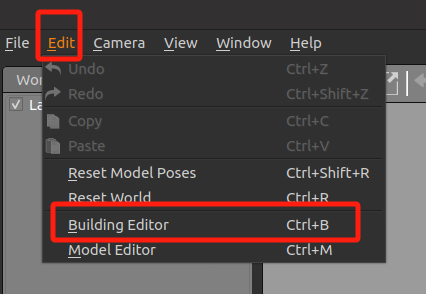
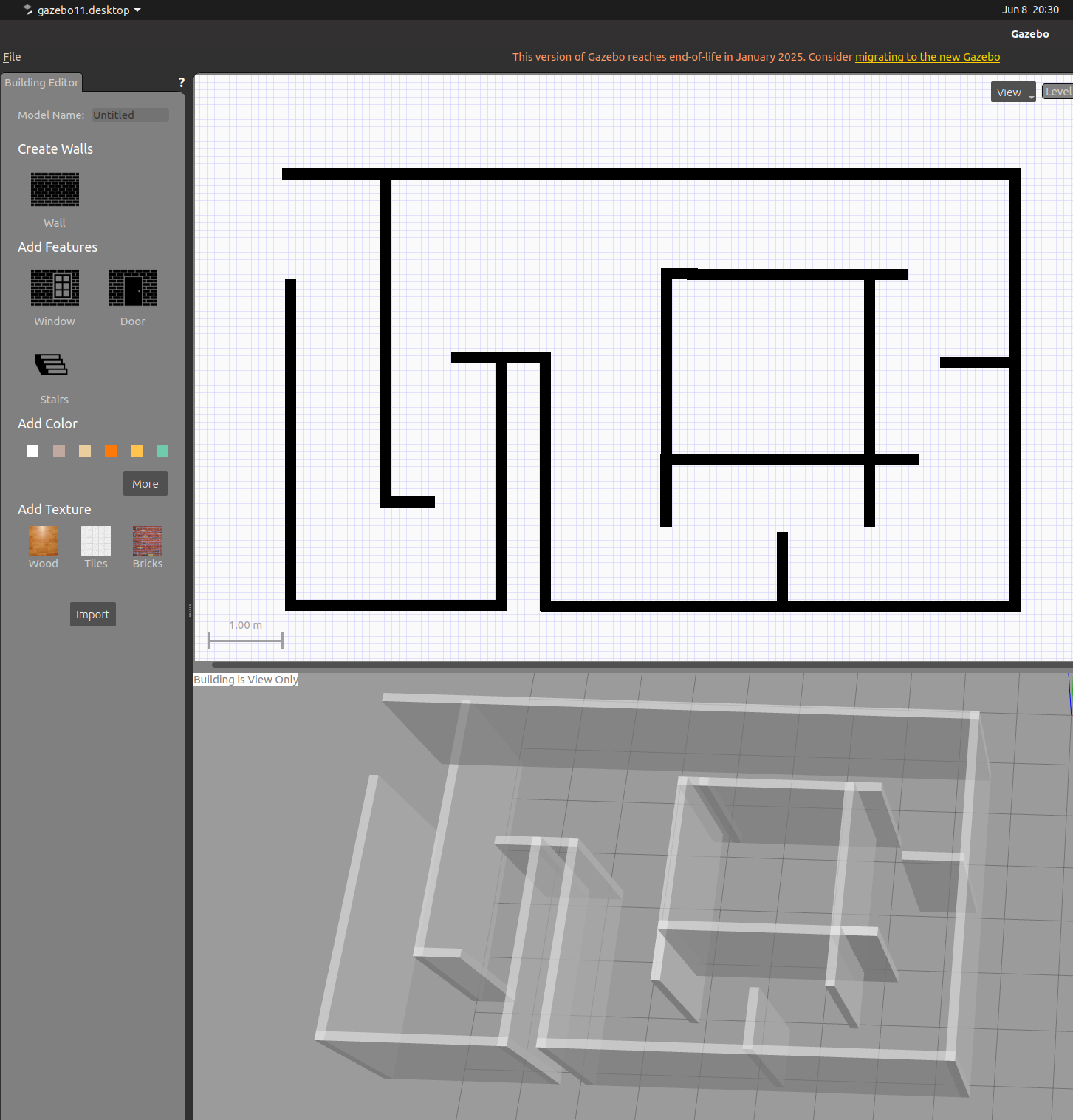
2.2 手动绘制地图
- 顶部Edit菜单栏-> “Building Editor”(构建) 模式,进入场景编辑界面。
- 使用 画墙工具 (Create Wall)绘制墙壁、隔断等结构(类似 CAD 操作)
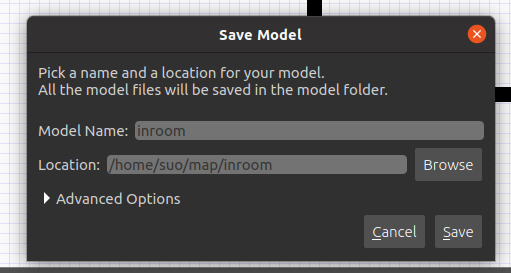
- 键盘Ctrl + S或者菜单File->Save保存环境
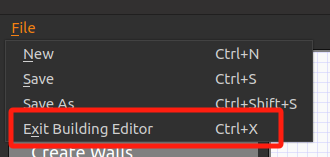
- Exit Building Editor 退出构建模式
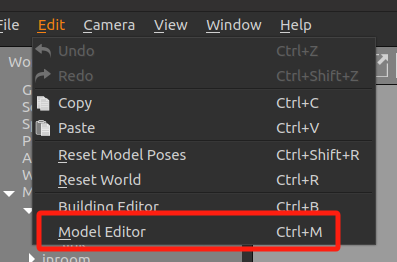
- 顶部Edit菜单栏-> “Model Editor”(修改) 模式,可以增加障碍物及模块等信息(要保留原来结构)
2.3 加载地图环境
- 首先启动gazebo环境
roslaunch gazebo_ros empty_world.launch
或者
gazebo
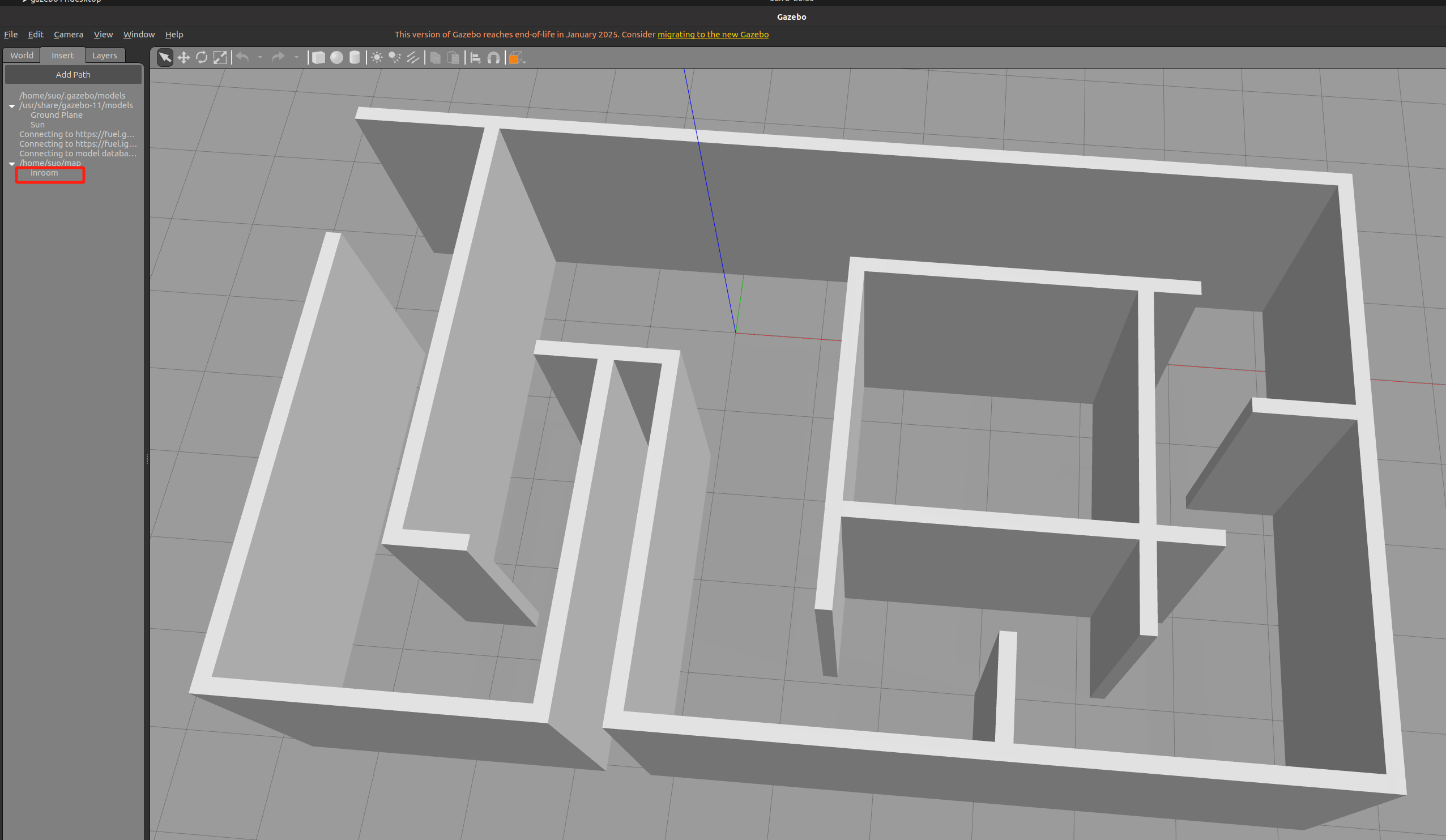
- 方案一:
在左侧insert菜单中找到地图(inroom)手动拖动 - 方案二:
通过下面命令动态放置
gz model -f ~/map/inroom/model.sdf -m inroom --pose 0 0 0
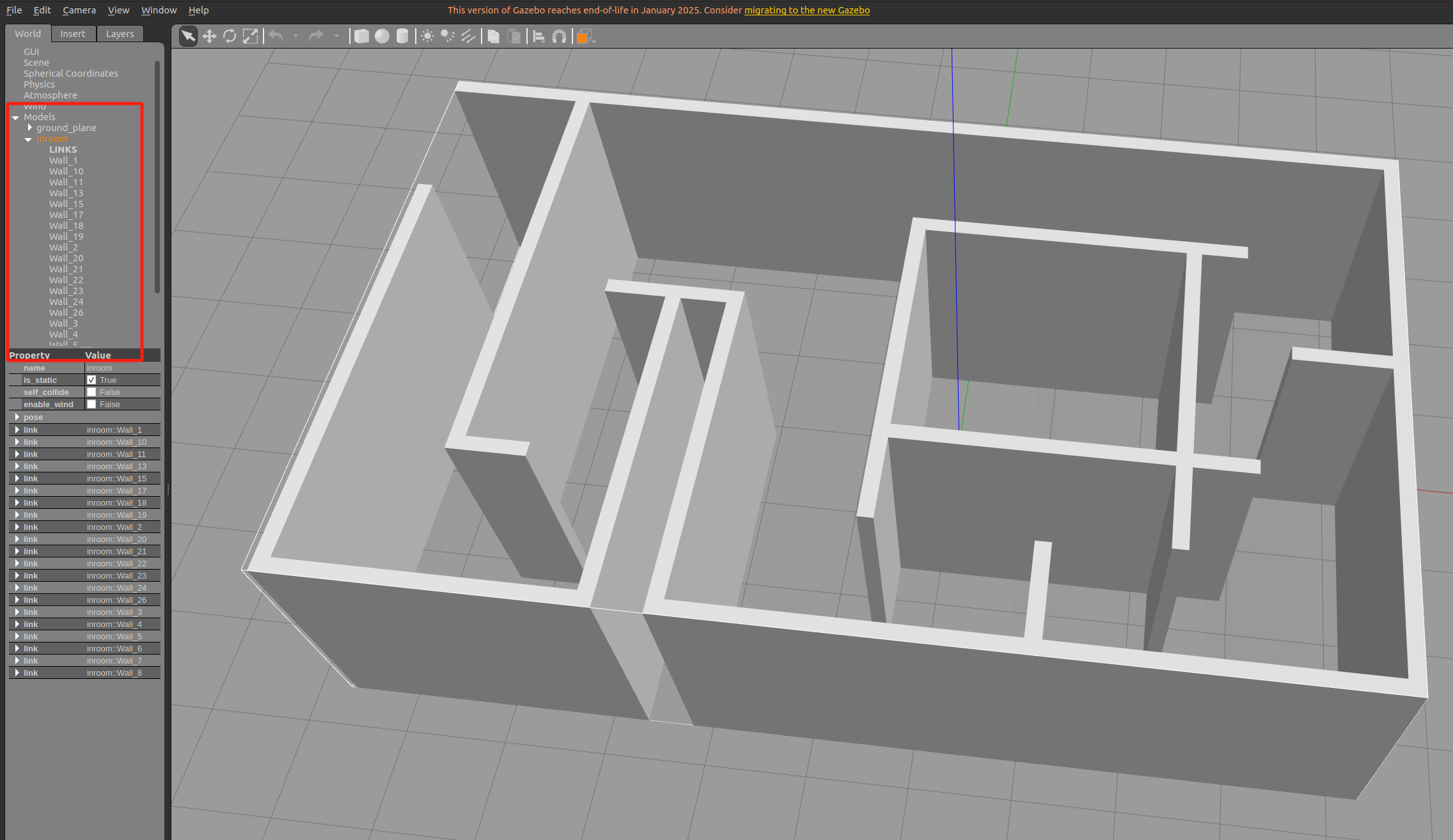
- 添加后,可以在world中看到地图的各个组成。