大家好!在如今人类对水下环境探索不断深入的时代,从水下考古到珊瑚礁考察,各种任务都离不开水下机器人的助力。但传统水下机器人尺寸较大,在狭窄的水下空间施展不开。今天,我们就来认识一款受海洋小生物启发而设计的仿生多运动模态水下微型机器人 ——RoboPteropod,看看它是如何在复杂水下环境中灵活穿梭的。
*本文只做阅读笔记分享*
一、设计灵感与背景
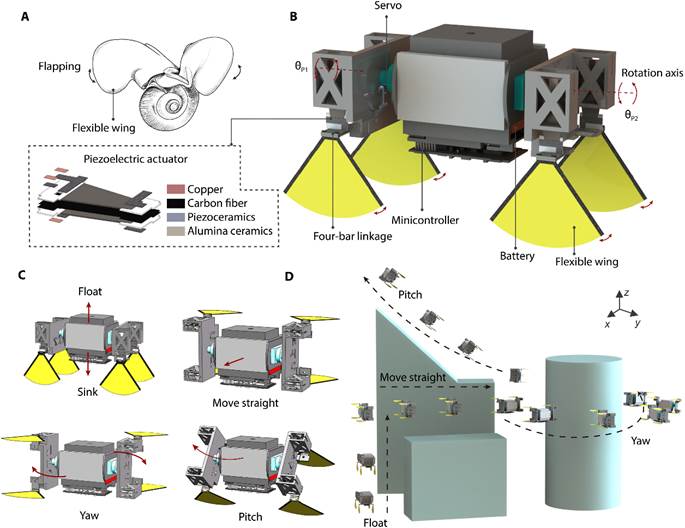
在浩瀚的海洋里,有一种小小的生物 —— 翼足类动物(pteropod),它就像一位灵动的舞者,能在水中自由地改变运动方向。它的秘诀就在于可以通过调整翅膀的攻角来实现各种动作。
科学家们受到这种生物的启发,设计出了 RoboPteropod。它体型小巧,长 7.5 厘米、宽 4 厘米、高 4.5 厘米,重 34 克 ,却有着强大的运动能力,能在复杂的水下环境中大展身手,这为水下探索带来了新的可能。
二、RoboPteropod 的设计
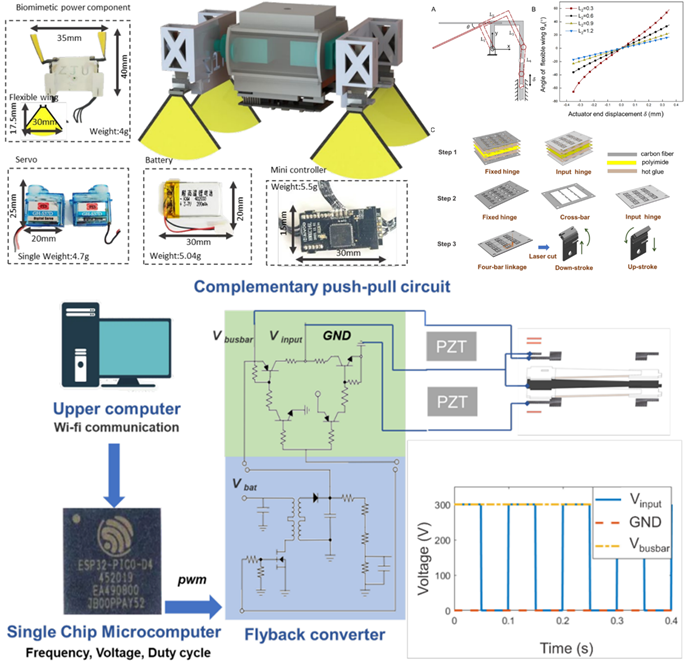
RoboPteropod 主要由仿生动力组件和控制单元构成,各个组件通过 3D 打印的主框架组装连接。仿生动力组件是它的核心,每个组件都有两个由压电驱动器驱动的柔性翅膀。就像翼足类动物的翅膀一样,这些柔性翅膀在压电驱动器的带动下,能实现高效的拍打运动。控制单元则像是机器人的大脑,由微型控制器、电池和伺服电机组成。它能接收外部计算机的控制信号,通过调整驱动信号的电压和频率,精准控制仿生动力组件的运动,进而实现机器人在水中多种运动模式的快速切换。
三、仿生动力组件的特性
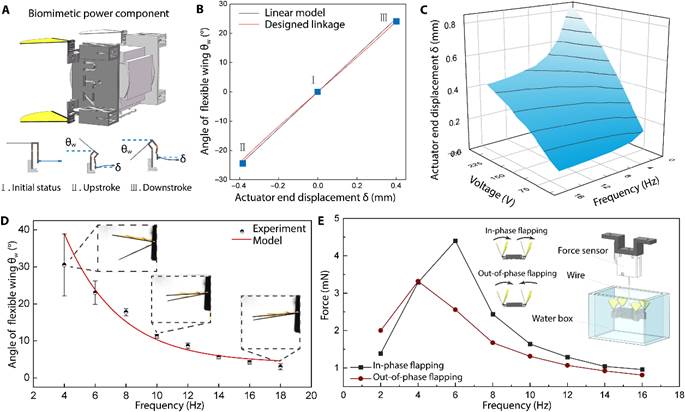
为了让 RoboPteropod 在运动过程中更易控制,科研人员对其仿生动力组件进行了优化设计和测试。压电驱动器通过四杆连杆带动柔性翅膀运动,经过优化设计的四杆连杆系统,能让翅膀的上下拍动完全对称,平衡侧向分离力,保障运动的稳定性。
在不同的电压和频率下,压电陶瓷的端点位移会发生变化,电压越高,端点位移越大;频率越高,端点位移越小。此外,研究人员还发现,通过调整翅膀的同相和反相拍打模式,可以有效解决机器人在低频运动时的俯仰问题,提高运动稳定性。
四、RoboPteropod 的多模态运动
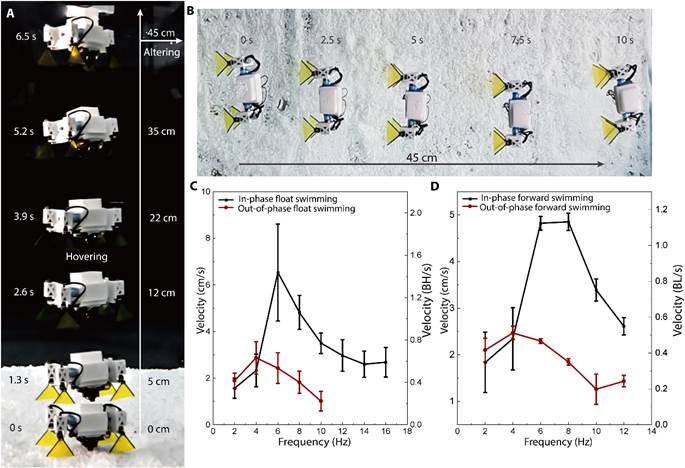
直线运动特性:在直线运动方面,通过调整机器人上浮力腔中液体的体积,能让机器人达到静态稳定状态。研究发现,在低频时,反相拍打模式能让机器人的俯仰运动近似正弦变化,且振幅随频率减小,此时反相拍打能消除机器人受力的水平分量,运动更稳定;高频时,同相拍打模式下翅膀同步拍打,力的峰值更高,运动速度更快。实验数据显示,在 6Hz 频率下,机器人上升速度可达 6.5cm/s,前进速度可达 4.8cm/s。
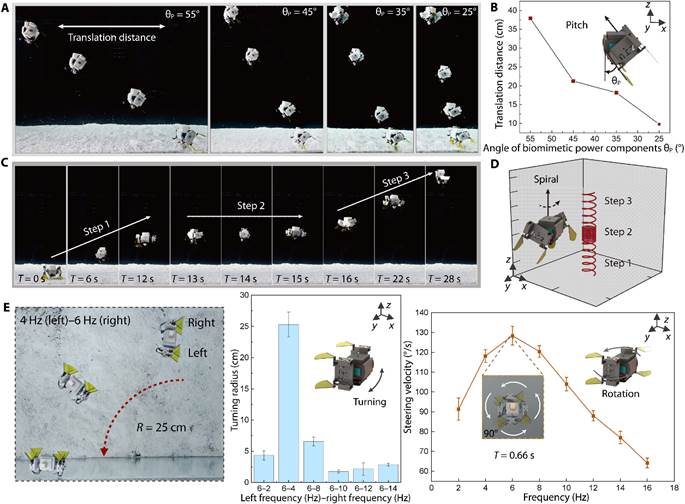
俯仰、螺旋和偏航性能:当机器人遇到障碍物需要斜向上攀爬时,俯仰运动就派上用场了。通过让仿生动力组件两侧以相同角度旋转,机器人就能实现俯仰运动,而且随着旋转角度增大,平移距离也会增加。在狭窄空间探索时,螺旋模式能帮助机器人快速侦察环境。让仿生动力组件两侧以相反角度旋转,机器人就会一边自转一边垂直上升。在偏航性能上,通过改变仿生驱动单元两侧的驱动频率,能调节机器人的转向半径,甚至实现零半径转向,这在狭窄空间中极为灵活。
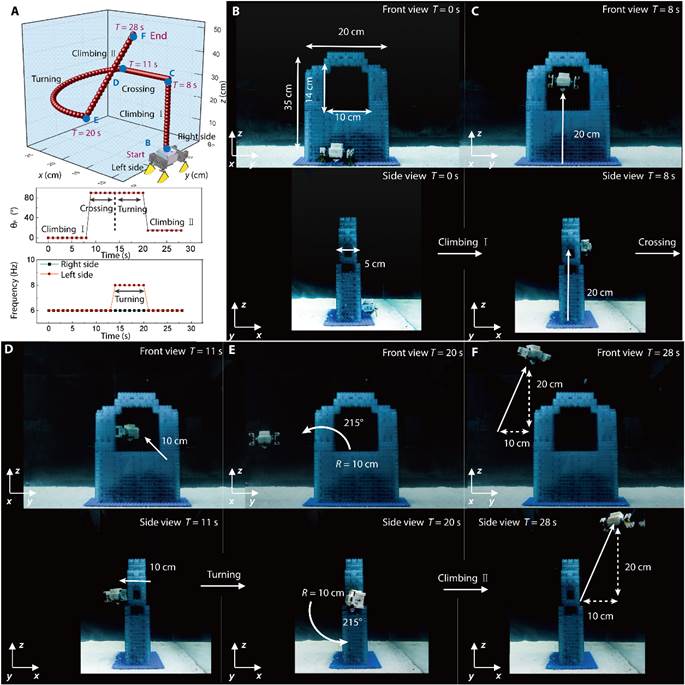
3D 水下运动轨迹:为了展示 RoboPteropod 在复杂环境中的运动能力,研究人员设计了一条复杂的 3D 轨迹,包括垂直攀爬、横向穿越、绕过障碍物和斜向上攀爬等动作。在实验中,机器人要穿越模拟的狭窄水下洞穴。它能按照预设的指令,在不同的运动模式之间快速切换,顺利完成整个轨迹,而且多次实验的轨迹平均误差仅为 46.18mm,这表明它的运动精度很高,能很好地适应复杂水下环境。
五、总结与展望
RoboPteropod 凭借其独特的设计,实现了高效的水下多模态运动。它的出现为微小型水下扑翼机器人的多自由度运动提供了新的解决方案,在狭窄水下空间的探索中展现出巨大潜力。未来,研究人员还计划通过增强机载传感实现闭环控制,并开发新的耐压底盘,让它能在深海和高压管道等更具挑战性的环境中执行任务。
六、一起来做做题吧
1、开发适用于狭窄水生环境的微型水下机器人面临的关键挑战不包括以下哪一项?( )
A. 执行敏捷 maneuvers 的能力
B. 小型化尺寸限制
C. 灵活的运动模式转换能力
D. 与传统水下机器人的兼容性
2、RoboPteropod 的仿生动力组件中,带动柔性翅膀运动的是( )。
A. 微型控制器
B. 压电驱动器
C. 伺服电机
D. 四杆连杆
3、在压电驱动器驱动柔性翅膀的过程中,随着驱动频率增加,压电陶瓷端点位移会( )。
A. 增大
B. 减小
C. 先增大后减小
D. 先减小后增大
4、在 RoboPteropod 的直线运动中,低频时哪种拍打模式更具优势?( )
A. 同相拍打
B. 反相拍打
C. 两者一样
D. 文中未提及
5、RoboPteropod 在执行 3D 水下运动轨迹实验时,穿越模拟狭窄水下洞穴过程中,以下哪种操作未涉及?( )
A. 改变仿生动力组件的角度
B. 调整驱动信号的频率
C. 释放机械手臂辅助
D. 接收模式切换命令
参考文献:
Taishan Liu et al. A bioinspired multimotion modality underwater microrobot. Sci. Adv.11, eadu2527(2025).



:容器存储接口 CSI)


