里程计模型:
- 两轮差分地盘的运动学模型
- 三轮全向底盘的运动学模型
- 航迹推算(Dead Reckoning)
里程计标定
- 线性最小二乘的基本原理
- 最小二乘的直线拟合
- 最小二乘在里程计标定中的应用
差分底盘的优势就是:
- 结构简单
- 便宜(2个电机)
- 模型简单
两轮差分地盘的运动学模型:
欠驱动系统:xy θ \theta θ三个自由度,vl和vr(两个xx)(意味着运动是耦合的)
(相关过程直接省略)使用的是 V L r − d = V R r + d \frac{V_L}{r-d}=\frac{V_R}{r+d} r−dVL=r+dVR然后得到 r = v R + v L v R − v L d r=\frac{v_R+v_L}{v_R-v_L}d r=vR−vLvR+vLd
公式:
v = v R + v L 2 ω = v R − v L 2 d \begin{align} \mathbf{v} &= \frac{v_R + v_L}{2} \\ \omega &= \frac{v_R - v_L}{2d} \end{align} vω=2vR+vL=2dvR−vL
从上面两式解出 v R , v L v_R,\,v_L vR,vL :
{ v R = v + ω d , v L = v − ω d . \begin{cases} v_R = v + \omega\,d,\\ v_L = v - \omega\,d. \end{cases} {vR=v+ωd,vL=v−ωd.
三轮全向底盘
具有以下的特点:
- 任何方向平移
- 全驱动系统: 3个自由度xy θ \theta θ 和 v1、v2、v3输入–》可以向任意方向运动
- 可进行运动学分解
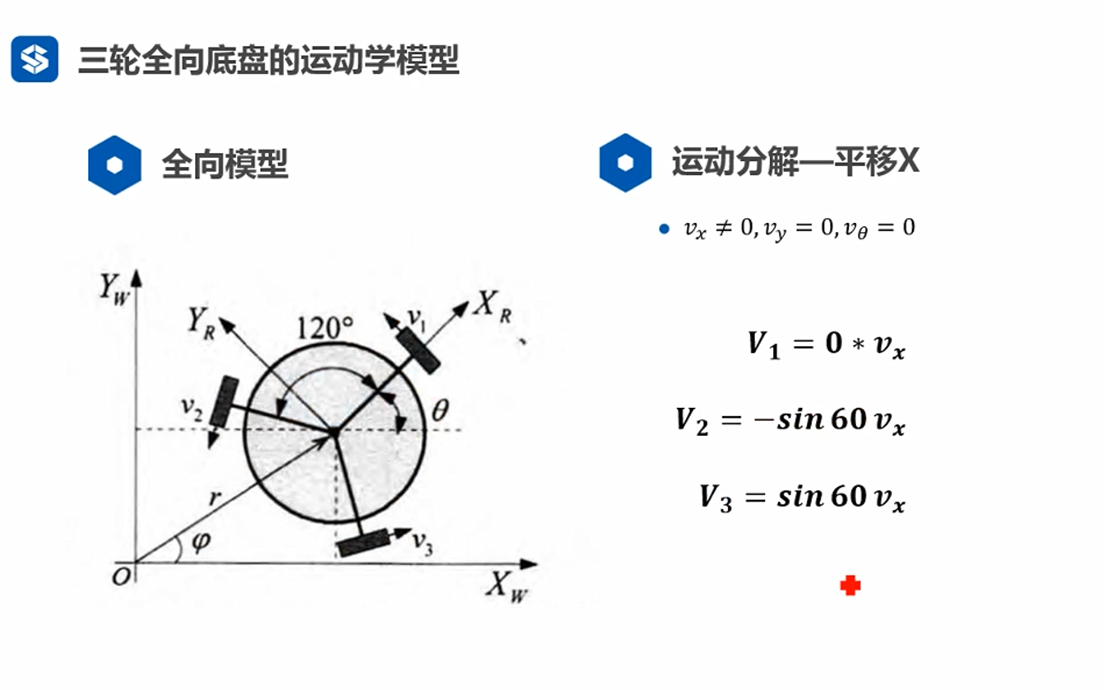
分解的方法就是假设只有一个方向
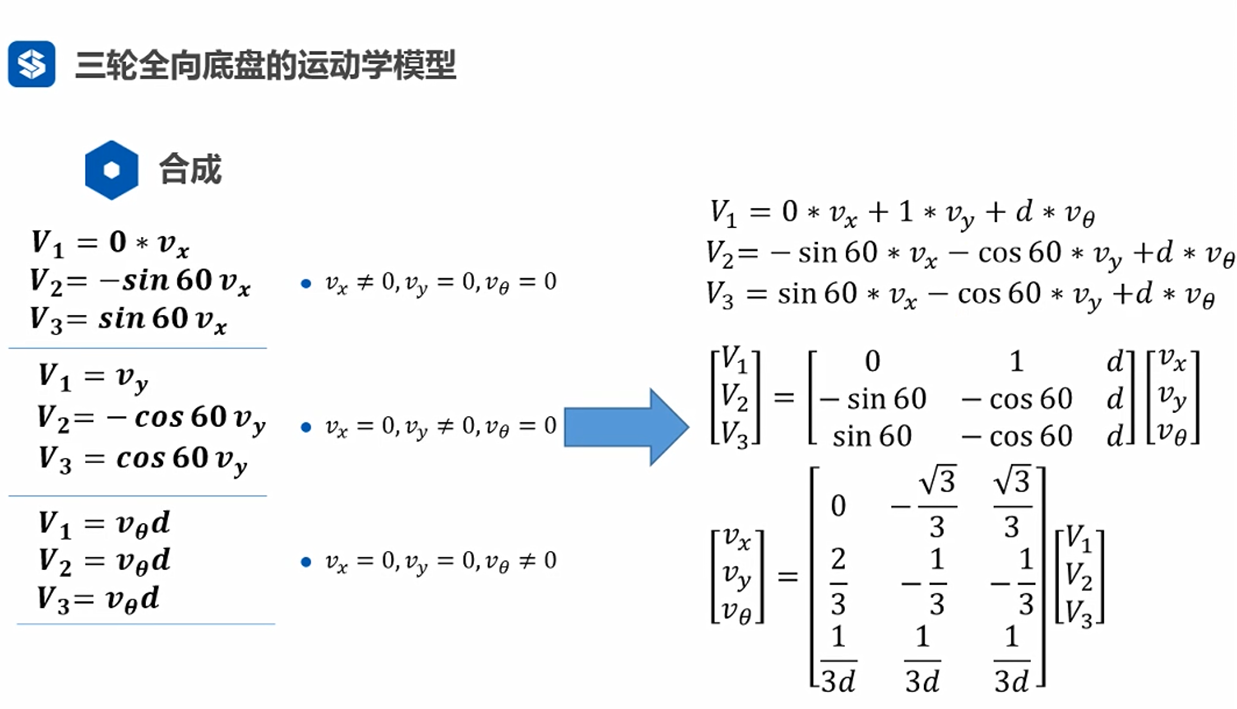
第一个:直接相加
第二个:是第一个的矩阵形式
第三个:第二个的逆矩阵
运动学预测(Prediction)——从增量到全局位姿
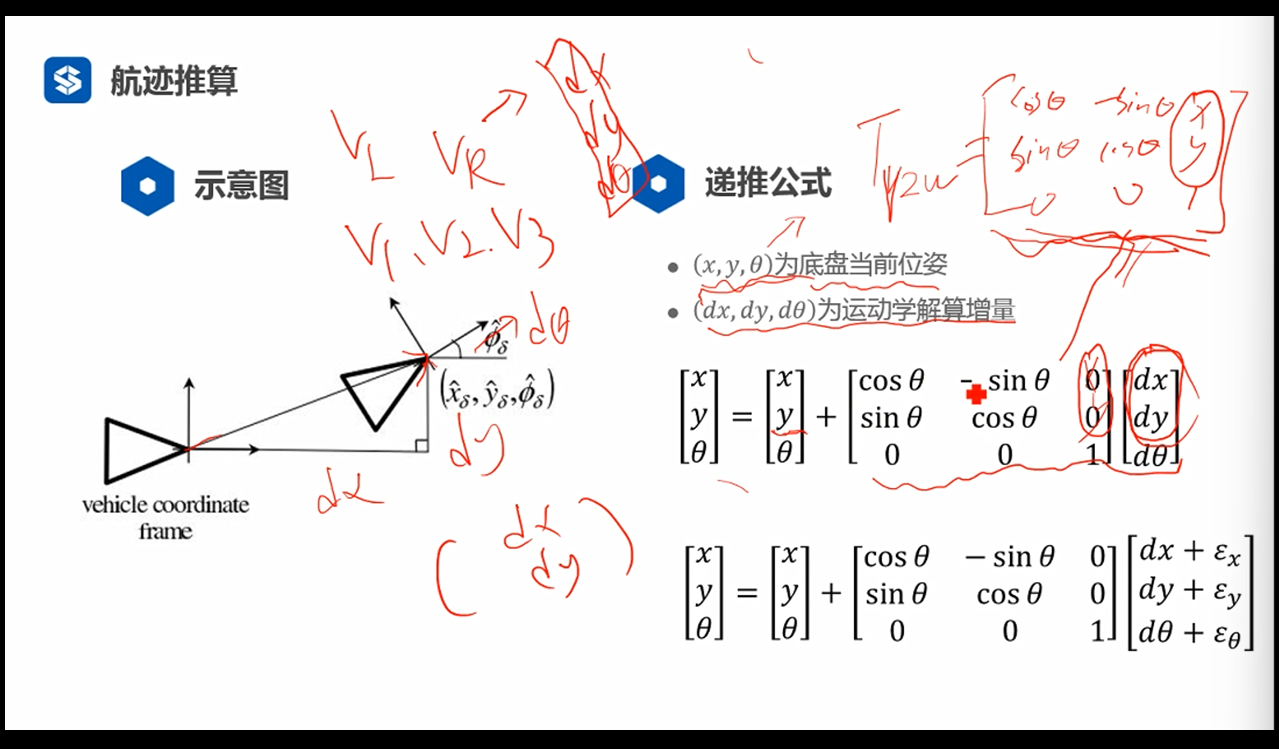
在移动机器人导航与定位中(如 EKF、粒子滤波等),预测步骤就是把机器人在自身坐标系下测得的运动增量 ( d x , d y , d θ ) (dx,dy,d\theta) (dx,dy,dθ),转换到全局坐标系并更新全局位姿 ( x , y , θ ) (x,y,\theta) (x,y,θ)。
-
坐标系与示意图
markdown复制编辑 机器人自身坐标系 全局坐标系▲ y_body ▲ Y│ /│ /│ /└───► x_body ●───► X- 自身坐标系:机器人车体前进方向为 x b o d y x_{body} xbody,左侧为 y b o d y y_{body} ybody。
- 全局坐标系:环境中的固定参考系,机器人初始位姿为 ( x , y , θ ) (x,y,\theta) (x,y,θ)。
-
运动增量与同质变换
机器人在自身坐标系下运动一小段距离,测得增量向量
Δ p b o d y = [ d x d y d θ ] . \Delta \mathbf{p}_{body} = \begin{bmatrix} dx \\ dy \\ d\theta \end{bmatrix}. Δpbody= dxdydθ .
要将它叠加到全局位姿,使用 3×3 同质坐标变换:
$$
T(\theta) ;=;
\begin{bmatrix}
\cos\theta & -\sin\theta & 0\[4pt]
\sin\theta & ;\cos\theta & 0\[4pt]
0 & 0 & 1
\end{bmatrix},
\quad
\begin{bmatrix} x’ \ y’ \ \theta’ \end{bmatrix}\begin{bmatrix} x \ y \ \theta \end{bmatrix}
;+;
T(\theta),\Delta \mathbf{p}_{body}.
展开即得: 展开即得: 展开即得:
\begin{bmatrix} x’ \ y’ \ \theta’ \end{bmatrix}\begin{bmatrix} x \ y \ \theta \end{bmatrix}
+
\begin{bmatrix}
\cos\theta & -\sin\theta & 0\
\sin\theta & ;\cos\theta & 0\
0 & 0 & 1
\end{bmatrix}
\begin{bmatrix} dx \ dy \ d\theta \end{bmatrix}.
$$- 第一行 x ′ = x + cos θ ⋅ d x − sin θ ⋅ d y x' = x + \cos\theta\cdot dx - \sin\theta\cdot dy x′=x+cosθ⋅dx−sinθ⋅dy
- 第二行 y ′ = y + sin θ ⋅ d x + cos θ ⋅ d y y' = y + \sin\theta\cdot dx + \cos\theta\cdot dy y′=y+sinθ⋅dx+cosθ⋅dy
- 第三行 θ ′ = θ + d θ \theta' = \theta + d\theta θ′=θ+dθ
-
旋转矩阵详解
同质矩阵 T ( θ ) T(\theta) T(θ) 中的前 2×2 子矩阵
R ( θ ) = [ cos θ − sin θ sin θ cos θ ] R(\theta)= \begin{bmatrix} \cos\theta & -\sin\theta\\ \sin\theta & \;\cos\theta \end{bmatrix} R(θ)=[cosθsinθ−sinθcosθ]- 用途:将自身坐标系下的平移增量 ( d x , d y ) T (dx,dy)^T (dx,dy)T 旋转到全局坐标系下。
- 逆变换:若要把全局系增量映回自身系,使用 R − 1 = R T R^{-1}=R^T R−1=RT:
$$
R(\theta)^{-1}
=R(\theta)^T\begin{bmatrix}
\cos\theta & \sin\theta\
-\sin\theta & \cos\theta
\end{bmatrix}.
$$ -
含噪声的运动模型
实际测量与执行存在误差,引入高斯噪声向量 ε = [ ε x , ε y , ε θ ] T \varepsilon=[\varepsilon_x,\varepsilon_y,\varepsilon_\theta]^T ε=[εx,εy,εθ]T:
$$
\Delta \mathbf{p}_{body}^{noisy}\begin{bmatrix} dx \ dy \ d\theta \end{bmatrix}
+
\begin{bmatrix}\varepsilon_x\\varepsilon_y\\varepsilon_\theta\end{bmatrix}.
完整预测更新为: 完整预测更新为: 完整预测更新为:
\begin{bmatrix} x’ \ y’ \ \theta’ \end{bmatrix}\begin{bmatrix} x \ y \ \theta \end{bmatrix}
+
T(\theta),\Delta \mathbf{p}_{body}^{noisy}.
$$
里程计标定
使用线性最小二乘法进行标定
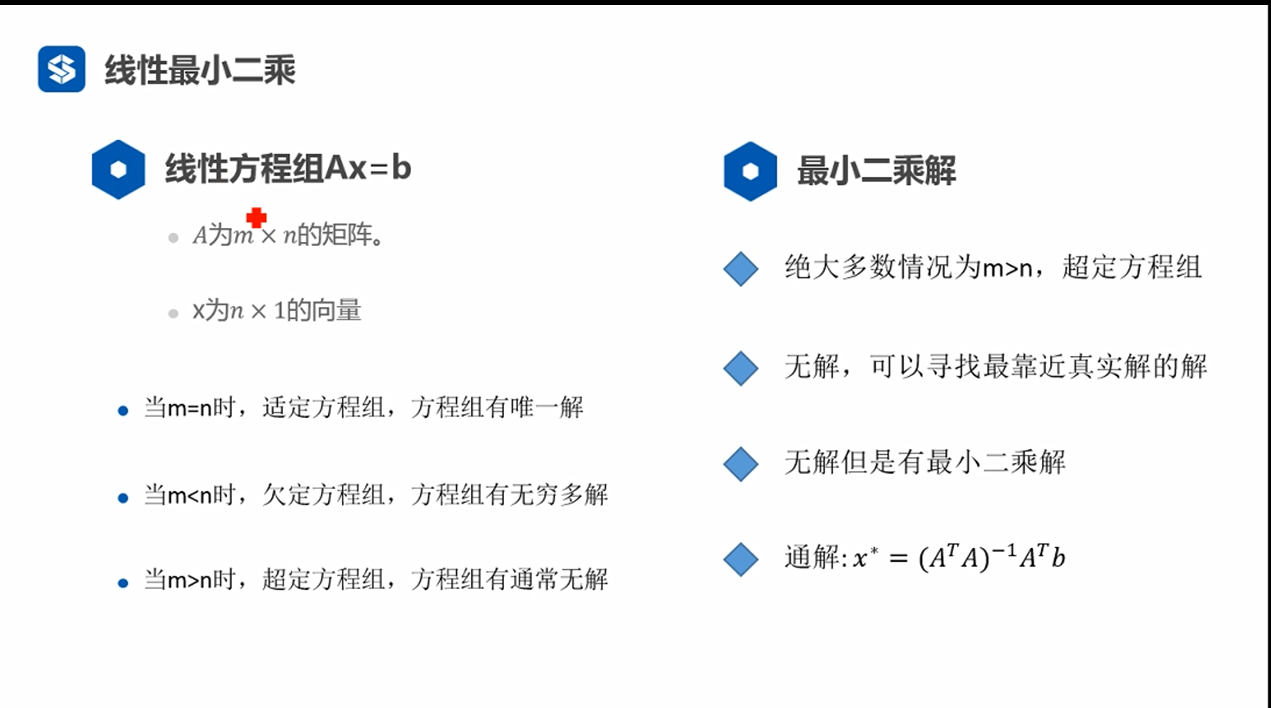
对于不同规模关系的线性方程组 A x = b A x = b Ax=b,常用的求解或近似方法如下:
- 适定方程组( m = n m = n m=n)
-
矩阵可逆( det A ≠ 0 \det A \neq 0 detA=0)时
x = A − 1 b x = A^{-1} b x=A−1b
或者更稳定地用 LU 分解、QR 分解等数值方法直接求解。 -
矩阵不可逆( det A = 0 \det A = 0 detA=0)时
退化为欠定/超定的情形,见下面。
- 欠定方程组( m < n m < n m<n,方程少于未知数)
-
无穷多解:通解可以写成
x = x 0 + N ( A ) , x = x_0 + N(A), x=x0+N(A),
其中 x 0 x_0 x0 是任意一个特解, N ( A ) N(A) N(A) 是齐次解空间(维度 n − m n-m n−m)。 -
最小范数解(最常用)
取唯一的 “最小二乘范数” 解(Moore–Penrose 伪逆),即
x ∗ = A T ( A A T ) − 1 b , x^* = A^T (A A^T)^{-1} b, x∗=AT(AAT)−1b,
它也是所有解中 ∥ x ∥ \|x\| ∥x∥ 最小者。
- 超定方程组( m > n m > n m>n,方程多于未知数)
-
无精确解:通常不存在满足所有方程的 x x x。
-
最小二乘解
求解
min x ∥ A x − b ∥ 2 , \min_x \|A x - b\|^2, xmin∥Ax−b∥2,
通解为正规方程
A T A x = A T b ⟹ x ∗ = ( A T A ) − 1 A T b . A^T A\,x = A^T b \quad\Longrightarrow\quad x^* = (A^T A)^{-1} A^T b. ATAx=ATb⟹x∗=(ATA)−1ATb.
在数值上,推荐使用 QR 分解 或 SVD 求解最小二乘,以保证稳定性。
即
- m = n m=n m=n:直接求逆或分解;
- $m:参数化通解,常取伪逆给出最小范数解;
- m > n m>n m>n:最小二乘,正规方程或分解方法。
一般来说通解是 x ∗ = ( A T A ) − 1 A T b . x^* = (A^T A)^{-1} A^T b. x∗=(ATA)−1ATb.但是会出现一些问题
- 超定方程组( m > n m>n m>n,方程多于未知数)
-
最小二乘解
x ∗ = ( A T A ) − 1 A T b x^* = (A^T A)^{-1} A^T b x∗=(ATA)−1ATb -
数值问题
- 条件数放大: κ ( A T A ) ≈ κ ( A ) 2 \kappa(A^TA)\approx\kappa(A)^2 κ(ATA)≈κ(A)2,小的浮点误差被平方放大,解可能极不准确。
- 对 b b b 的微小扰动敏感:当 b → b + δ b b\to b+\delta b b→b+δb 时, x ∗ x^* x∗ 的变化往往远大于 δ b \delta b δb。
- A T A A^TA ATA 不可逆或病态:若 A A A 列不满秩, A T A A^TA ATA 奇异;即便可逆,也可能因病态(高条件数)而不可靠。
-
改进方法
-
QR 分解:令 A = Q R A=Q R A=QR,解 R x = Q T b R\,x=Q^T b Rx=QTb,避免直接构造并求逆 A T A A^TA ATA。
-
SVD/伪逆: A = U Σ V T A=U \Sigma V^T A=UΣVT,取
x ∗ = V Σ + U T b , x^* = V\,\Sigma^+\,U^T b, x∗=VΣ+UTb,
可处理秩亏且更稳定。 -
正则化(Ridge):
x ∗ = ( A T A + λ I ) − 1 A T b , λ > 0 x^* = (A^T A + \lambda I)^{-1}A^T b,\quad \lambda>0 x∗=(ATA+λI)−1ATb,λ>0
对抗病态与噪声。
-


》逐章精华笔记第五章)
)


