已解决:修改LiDAR_IMU_Init中的intensity格式;
在官方发布的rs_liadr驱动文件的CMakeLists.txt中定义了点云格式;
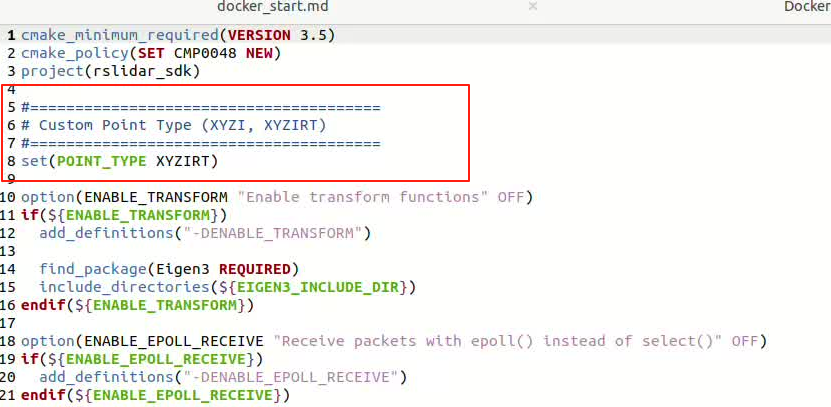
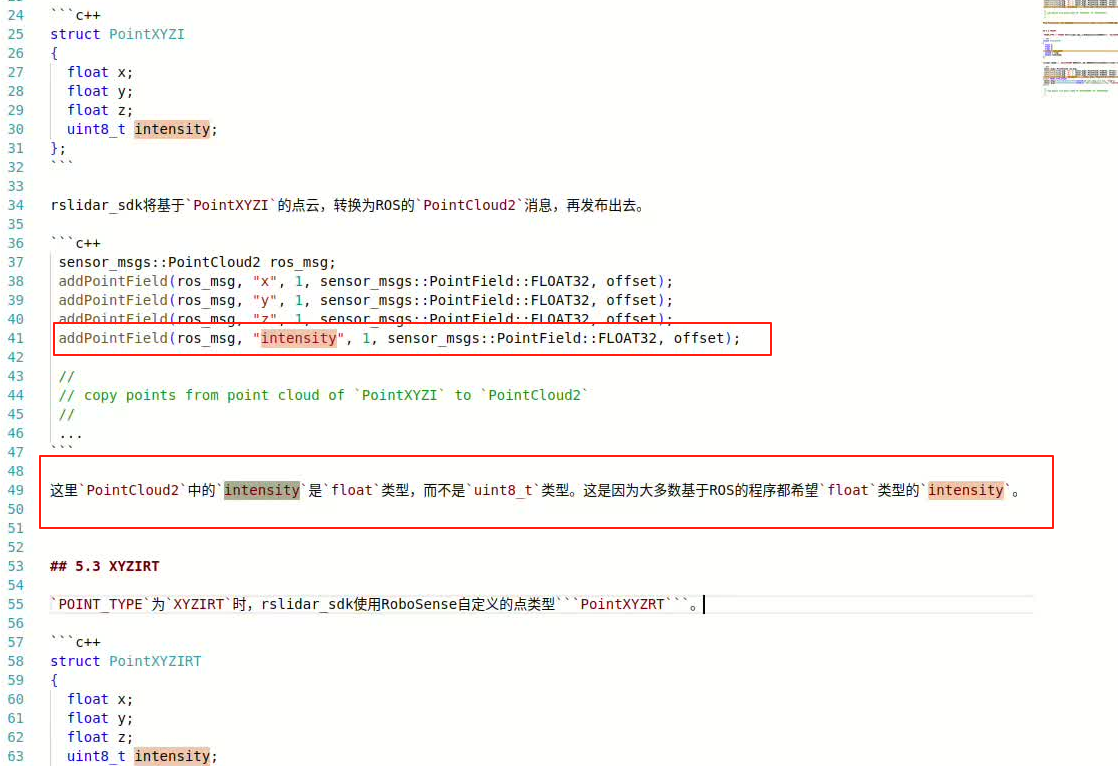

也就是说rs_liadr 的intesity虽然是被官方定义为uint8-t格式,但是他们悄默默还是按照主流的float格式发布,然后LiDAR_IMU_Init(https://github.com/hku-mars/LiDAR_IMU_Init)的preprocess.h文件定义格式还是按照官方明面的的uint8-t格式在定义:

所以会出现如下报错:

按照如下格式修改:
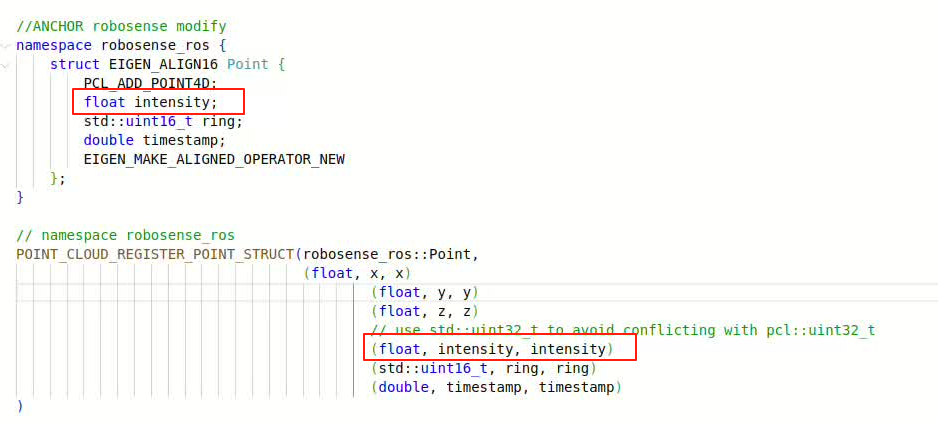
结果一切正常:

补充:按照LiDAR_IMU_Init官方安装的dockerfile安装的镜像和容器,会出现在vscode远程不满足依赖条件版本的问题,需要将vscode转移到1.98版本以下重新安装,我装的是1.96版本,可以用,以下是下载链接,需要取消软件和插件的自动更新:
November 2024 (version 1.96)




